
基于可编程逻辑控制器的协同运动控制系统的研究综述报告.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于可编程逻辑控制器的协同运动控制系统的研究综述报告.docx
基于可编程逻辑控制器的协同运动控制系统的研究综述报告当前,随着机器人技术的快速发展,人们对于机器人控制系统的要求也越来越高。协同运动控制系统作为机器人控制系统中的一个重要组成部分,是保证机器人高效、稳定、精确运动的关键技术之一。而基于可编程逻辑控制器(PLC)的协同运动控制系统,则是目前应用较为广泛的一种控制系统。本文将对基于PLC的协同运动控制系统的研究现状进行综述。首先,将简要介绍PLC和协同运动控制系统的相关概念。其次,将重点论述基于PLC的协同运动控制系统的工作原理、特点、优势及应用领域。最后,从

基于可编程控制器的分切机控制系统的研究的综述报告.docx
基于可编程控制器的分切机控制系统的研究的综述报告可编程控制器(PLC)技术是自动化工程中最广泛应用的控制技术之一,具有性能稳定、可靠性高、易于维护等优点。在分切机控制系统中,PLC作为实现运动控制、信号采集、故障诊断等多种功能的核心控制器,已成为关键技术之一。近年来,PLC在分切机控制系统中的应用研究日益深入,多种新型的控制系统被提出和应用,可实现高速、高精度、多功能等要求。本文对可编程控制器在分切机控制系统中的应用进行了综述。1.分切机控制系统的基本结构分切机控制系统主要由PLC控制器、伺服电机、传感器
可编程逻辑控制器、基于PLC的运动控制方法.pdf
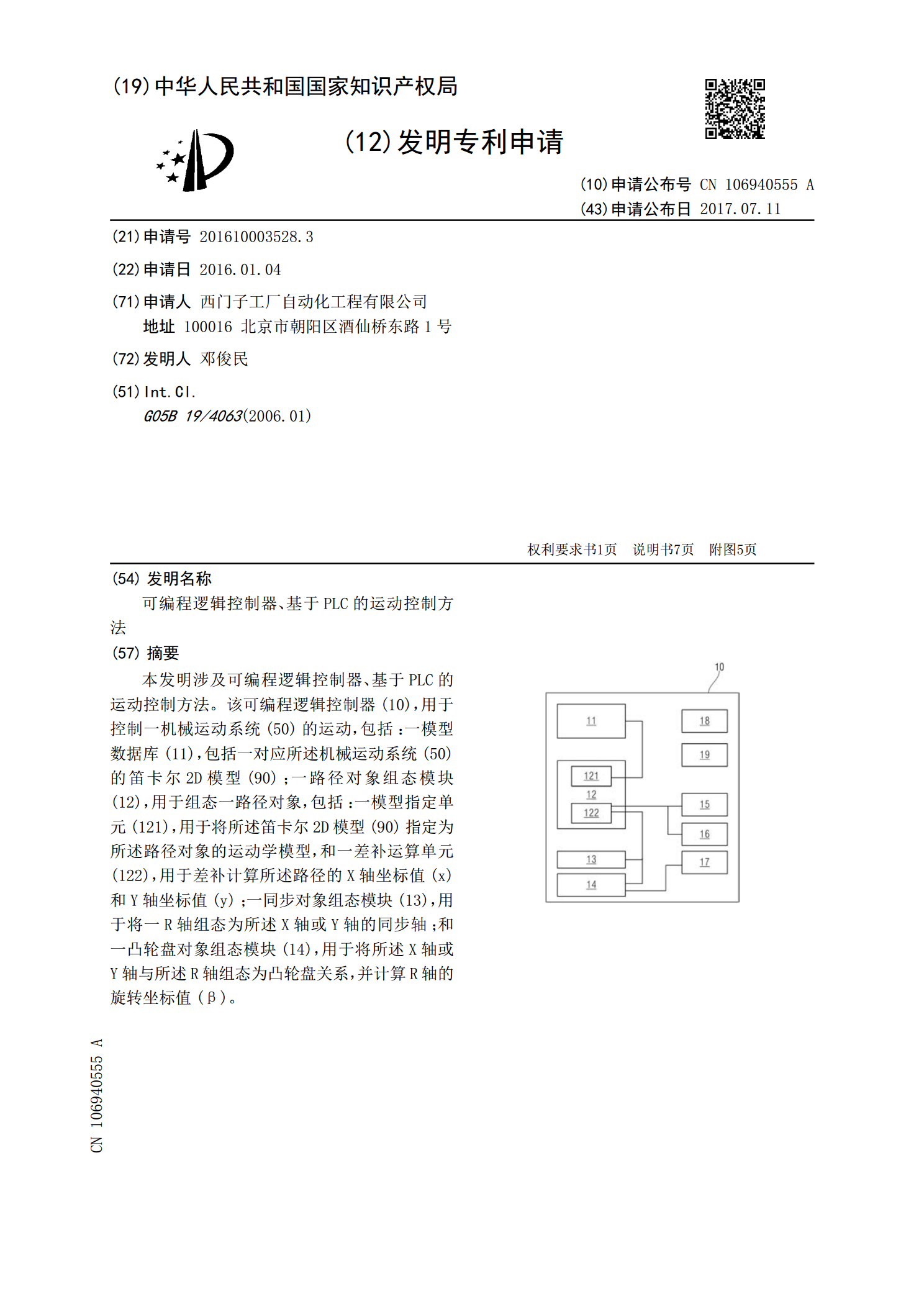
本发明涉及可编程逻辑控制器、基于PLC的运动控制方法。该可编程逻辑控制器(10),用于控制一机械运动系统(50)的运动,包括:一模型数据库(11),包括一对应所述机械运动系统(50)的笛卡尔2D模型(90);一路径对象组态模块(12),用于组态一路径对象,包括:一模型指定单元(121),用于将所述笛卡尔2D模型(90)指定为所述路径对象的运动学模型,和一差补运算单元(122),用于差补计算所述路径的X轴坐标值(x)和Y轴坐标值(y);一同步对象组态模块(13),用于将一R轴组态为所述X轴或Y轴的同步轴;和

可编程逻辑控制器及其控制系统.pdf
本发明提供了可编程逻辑控制器及其控制系统,其中控制器包括依次连接的北斗接收天线、变频放大器、北斗RDSS芯片、数据解析器和数据处理器;北斗接收天线接收来自控制终端的北斗卫星信号;变频放大器对北斗卫星信号进行放大变频处理,得到北斗基带信号;北斗RDSS芯片对北斗基带信号进行模数转换和解调处理,得到基带信号数据;数据解析器解析基带信号数据,将解析得到的数据发送至数据处理器;数据处理器根据解析得到的数据进行相应的操作。本发明中的PLC作为被控设备能够通过无线控制的方式工作,无需布设线路,能够缓解PLC作为被控设

基于可编程逻辑控制器的变频调速系统研究.pptx
添加副标题目录PART01PART02变频调速系统的定义变频调速系统的原理变频调速系统的应用PART03可编程逻辑控制器的定义可编程逻辑控制器在变频调速系统中的功能可编程逻辑控制器在变频调速系统中的优势PART04系统硬件设计系统软件设计系统调试与优化PART05系统实现方案系统实现过程系统实现效果PART06测试环境与方法测试结果与分析系统性能评估与优化建议PART07应用前景分析技术发展趋势未来研究方向感谢您的观看