
基于DSP的四足液压机器人伺服驱动器的设计与研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于DSP的四足液压机器人伺服驱动器的设计与研究.docx
基于DSP的四足液压机器人伺服驱动器的设计与研究摘要:随着机器人技术的不断发展和进步,四足机器人作为一种新型机器人,具有优异的性能和广阔的应用前景。其中,使四足机器人能够有效地运动和执行任务的伺服驱动系统尤其重要。本文针对四足液压机器人伺服驱动器进行了设计与研究。首先,对四足液压机器人的特点和应用领域进行了简要介绍。然后,介绍了基于DSP的伺服驱动器的原理和设计要点。最后,通过实验验证了该伺服驱动器的性能和优越性。本文的研究结论可为四足液压机器人的伺服驱动器设计和优化提供参考。关键词:四足液压机器人;伺服

基于DSP的交流伺服驱动器设计.docx
基于DSP的交流伺服驱动器设计基于DSP的交流伺服驱动器设计摘要:交流伺服驱动技术在现代工业自动化中有着广泛的应用。本论文将基于数字信号处理(DSP)技术,讨论交流伺服驱动器的设计。首先,介绍了交流伺服驱动器的基本原理和特点。然后,详细描述了DSP在交流伺服驱动器中的作用,并分析了其优势和挑战。接着,探讨了DSP在交流伺服驱动器设计中的关键技术,包括电流控制、速度控制和位置控制。最后,通过实验证明了基于DSP的交流伺服驱动器设计的有效性和实用性。关键词:交流伺服驱动器、数字信号处理、电流控制、速度控制、位

基于DSP和EPA技术的直流伺服驱动器的设计与研究.docx
基于DSP和EPA技术的直流伺服驱动器的设计与研究摘要近年来,随着工业自动化的发展,伺服驱动器在各个领域得到了广泛的应用。本文以直流伺服驱动器为研究对象,结合DSP和EPA技术对其进行设计与研究。首先介绍了直流伺服驱动器的基本原理和工作方式,接着对DSP和EPA技术进行了详细介绍,并重点阐述了其在伺服驱动器中的应用。进一步探讨了直流伺服驱动器在控制性能和稳定性方面的优势,并结合实验结果进行了验证。最后,总结了本文的研究成果,展望了未来的发展方向。关键词:直流伺服驱动器;DSP;EPA;控制性能;稳定性1.

四足机器人电动伺服液压源.pdf
本发明提供一种四足机器人电动伺服液压源,包括由伺服电机(1)驱动的定量齿轮泵(2),定量齿轮泵(2)的出油口与排油管(4)的进口相连,排油管(4)的中部自前向后依次设有排油管单向阀(5)、过滤器(6)和蓄能器(7),排油管(4)分别与左前腿供油管(8)、右前腿供油管(9)、左后腿供油管(10)和右后腿供油管(11)的进油口相连。其目的在于提供一种四足机器人电动伺服液压源具有质量轻,有效容积大,补油压力恒定,续航里程长,噪音小,使用寿命长,性能稳定可靠的四足机器人电动伺服液压源。
基于DSP_FPGA的交流伺服驱动器设计.pdf
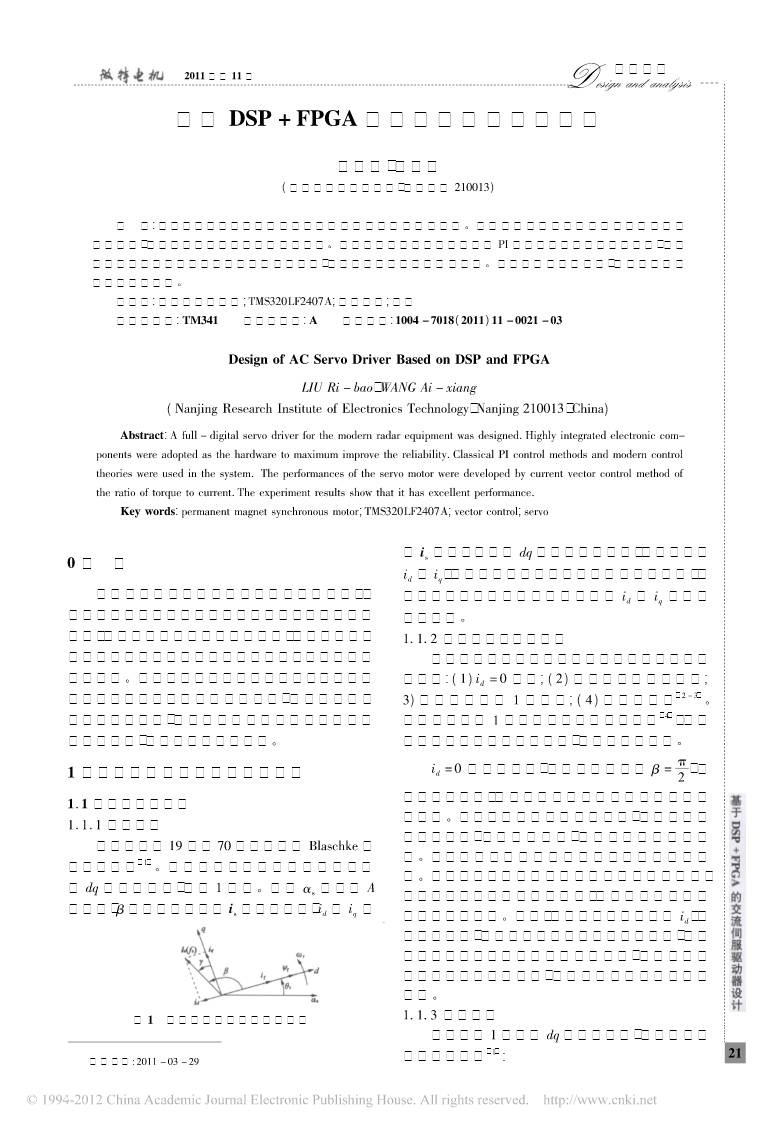
设计分析2011年第11期esignandanalysisD基于DSP+FPGA的交流伺服驱动器设计刘日宝,王爱祥(南京电子技术研究所,江苏南京210013)摘要:设计了一种应用于现代雷达设备的全数字交流伺服驱动器该驱动器硬件大部分由高度集成的电子。元件构成,最大限度地提高系统的工程可靠性。软件控制策略则是采用经典的PI校正与现代控制理论相结合,并且通过力矩电流之比最大的电流矢量控制方法,充分发挥了伺服电动机