
五自由度上肢康复机器人训练系统的研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

五自由度上肢康复机器人训练系统的研究.docx
五自由度上肢康复机器人训练系统的研究随着现代医学技术的不断发展,机械康复治疗在康复医疗领域中的作用逐渐受到广泛重视。上肢康复机器人作为机械康复治疗的重要手段之一,具有较高的康复效果和治疗效率,特别是在中风等卒中后遗症患者的康复治疗中,展现出了良好的治疗效果。本文从五自由度上肢康复机器人训练系统的角度出发,对其研究进展和未来发展趋势进行了探讨。一、研究现状目前,国内外已经有很多研究者对于上肢康复机器人进行了研究,其主要研究方向包括机器人控制算法、机械设计、运动学分析等多个方面。五自由度上肢康复机器人是指该系

五自由度上肢康复机器人康复评价系统的研究.docx
五自由度上肢康复机器人康复评价系统的研究五自由度上肢康复机器人康复评价系统的研究摘要:上肢功能障碍是常见的康复问题,严重影响患者的生活质量。上肢康复机器人被广泛应用于康复治疗中,但如何对机器人康复效果进行客观评价一直是一个挑战。本研究提出了一种基于五自由度上肢康复机器人的康复评价系统,旨在为康复治疗提供客观可靠的量化评价指标。引言:上肢功能障碍是由于中风、脊髓损伤、肌肉萎缩等原因引起的,严重影响患者的生活质量。传统的康复方法通常需要大量的人工参与及周期长,效果有限。而上肢康复机器人具有无疲劳、可重复、定制

五自由度上肢康复机器人训练系统的研究的任务书.docx
五自由度上肢康复机器人训练系统的研究的任务书任务书一、任务目的上肢功能障碍是常见的康复问题,严重影响了患者的日常生活和社交能力。因此,研究并开发一套五自由度上肢康复机器人训练系统,可以有效地帮助患者恢复上肢功能,并提高他们的生活质量。二、任务内容1.研究上肢康复机器人的设计要求和技术指标。考虑人体工学、生物力学、运动学等因素,确定机器人的最佳运动轨迹。2.根据机器人的设计要求和技术指标,进行机械结构的设计与优化。考虑机械传动、控制系统、传感器等方面的因素,提高机器人的精准度和可靠性。3.开发上肢康复机器人
二自由度上肢康复训练机器人系统.pdf
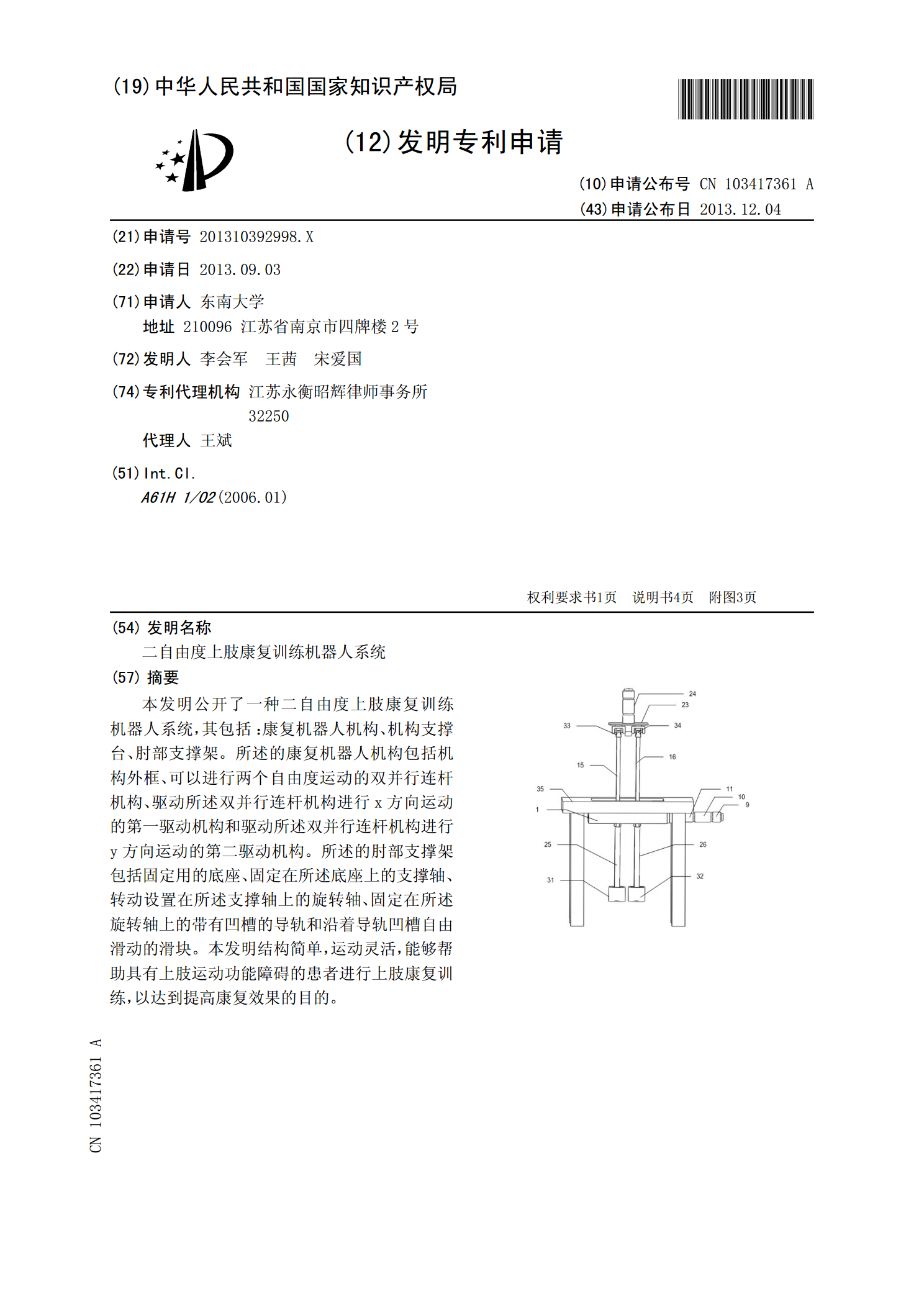
本发明公开了一种二自由度上肢康复训练机器人系统,其包括:康复机器人机构、机构支撑台、肘部支撑架。所述的康复机器人机构包括机构外框、可以进行两个自由度运动的双并行连杆机构、驱动所述双并行连杆机构进行x方向运动的第一驱动机构和驱动所述双并行连杆机构进行y方向运动的第二驱动机构。所述的肘部支撑架包括固定用的底座、固定在所述底座上的支撑轴、转动设置在所述支撑轴上的旋转轴、固定在所述旋转轴上的带有凹槽的导轨和沿着导轨凹槽自由滑动的滑块。本发明结构简单,运动灵活,能够帮助具有上肢运动功能障碍的患者进行上肢康复训练,以

上肢康复机器人系统设计及康复训练方法研究.docx
上肢康复机器人系统设计及康复训练方法研究上肢康复机器人系统设计及康复训练方法研究摘要:近年来,上肢康复机器人系统在康复领域中得到了广泛应用。本文针对上肢康复机器人系统的设计和康复训练方法进行了研究。首先,介绍了上肢康复机器人系统的发展现状和应用情况。然后,探讨了设计上肢康复机器人系统的关键技术和原理。最后,提出了一种基于虚拟现实的上肢康复训练方法,并进行了实验验证。研究结果表明,上肢康复机器人系统在促进上肢功能恢复方面具有良好的效果。关键词:上肢康复,机器人系统,康复训练,虚拟现实1.引言由于各种原因,如