
三自由度上肢康复机器人的研制综述报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

三自由度上肢康复机器人的研制综述报告.docx
三自由度上肢康复机器人的研制综述报告随着人口老龄化的加剧和人们对生活质量的要求不断提高,康复医学得到了越来越多的关注。近年来,上肢康复机器人作为一种新型的治疗手段,在康复医学领域中受到了广泛的关注和研究。上肢康复机器人是指通过计算机控制的运动平台和电机、气缸或其他形式的驱动机构,辅助患者完成受损上肢的运动康复训练,并且具有较好的定位性和重复性,可以为患者提供更为准确、安全和高效的康复治疗。本文旨在对三自由度上肢康复机器人的研制进行综述,以期了解其现状和未来的发展方向。一、研究背景和意义随着上肢功能障碍人群

三自由度上肢康复机器人研制的任务书.docx
三自由度上肢康复机器人研制的任务书任务书一、任务背景上肢功能障碍是常见的康复问题。传统上肢康复训练方法主要依靠康复师的手工操作进行实施,耗时长、工作负担大,同时受到康复师技术水平和工作强度等因素的影响,无法满足患者康复训练的需求。现代医学技术不断发展,研制上肢康复机器人是一种越来越重要的康复手段,可有效提高训练效率和康复效果,为患者提供更好的康复服务。二、任务目标研制一台三自由度上肢康复机器人,可以模拟人类上肢的运动轨迹,为患者提供更加准确、全面、个性化的康复训练。三、任务内容(一)机械系统设计1、研究上

上肢康复机器人研究综述.docx
上肢康复机器人研究综述1.内容简述本文主要综述了上肢康复机器人的研究现状和发展趋势,首先介绍了上肢康复机器人的定义、分类以及应用领域,然后详细阐述了上肢康复机器人的技术原理和结构特点。对国内外上肢康复机器人的发展历程进行了梳理,重点关注了近年来的主要研究成果和技术进展。在此基础上,分析了上肢康复机器人在临床应用中的优势和局限性,并提出了未来研究方向和挑战。还对上肢康复机器人的市场前景进行了预测,并探讨了其在促进康复医学发展和提高患者生活质量方面的作用。1.1研究背景与意义随着医疗技术的不断进步和人口老龄化
二自由度上肢康复训练机器人系统.pdf
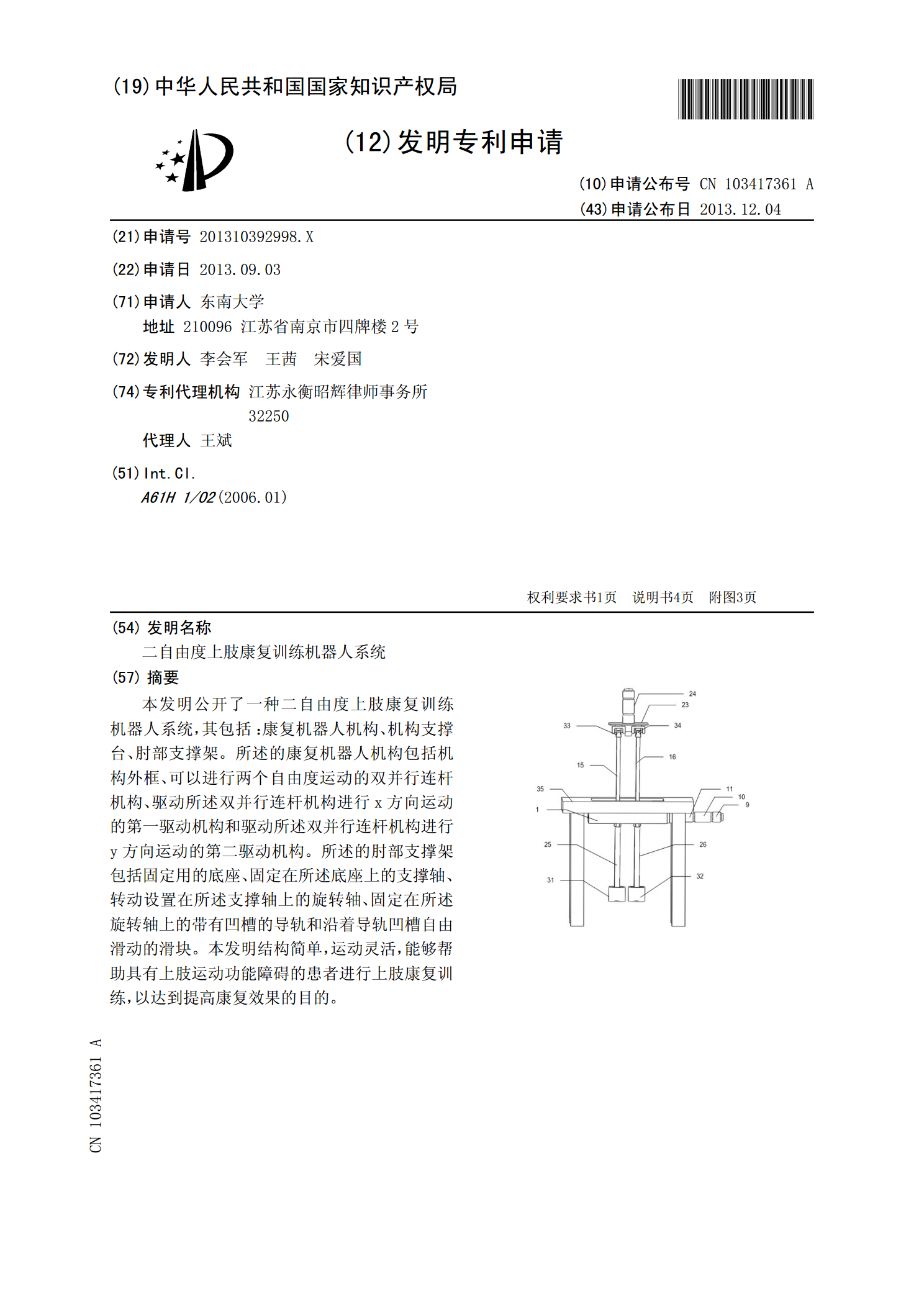
本发明公开了一种二自由度上肢康复训练机器人系统,其包括:康复机器人机构、机构支撑台、肘部支撑架。所述的康复机器人机构包括机构外框、可以进行两个自由度运动的双并行连杆机构、驱动所述双并行连杆机构进行x方向运动的第一驱动机构和驱动所述双并行连杆机构进行y方向运动的第二驱动机构。所述的肘部支撑架包括固定用的底座、固定在所述底座上的支撑轴、转动设置在所述支撑轴上的旋转轴、固定在所述旋转轴上的带有凹槽的导轨和沿着导轨凹槽自由滑动的滑块。本发明结构简单,运动灵活,能够帮助具有上肢运动功能障碍的患者进行上肢康复训练,以

上肢康复机器人的发展及应用综述.docx
上肢康复机器人的发展及应用综述目录一、内容描述................................................21.1背景介绍.............................................21.2康复机器人的重要性...................................41.3上肢康复机器人的研究意义.............................5二、上肢康复机器人的发展历程.......................