
高升阻比滑翔飞行器再入制导方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高升阻比滑翔飞行器再入制导方法研究.docx
高升阻比滑翔飞行器再入制导方法研究高升阻比滑翔飞行器再入制导方法研究摘要:高升阻比滑翔飞行器再入制导是航空航天领域的研究热点之一。本论文通过综述各种滑翔飞行器再入制导技术,并分析了其优缺点,提出了一种综合考虑高升阻比滑翔飞行器特点的再入制导方法,旨在提高滑翔飞行器再入制导的精确性和可靠性。关键词:高升阻比;滑翔飞行器;再入制导;精确性;可靠性一、引言高升阻比滑翔飞行器具有很强的再入能力,广泛应用于航天领域。再入过程中的制导是保证滑翔飞行器安全准确降落的关键。本论文将分析现有的滑翔飞行器再入制导技术,并提出
高超声速滑翔飞行器线性伪谱再入制导方法和系统.pdf
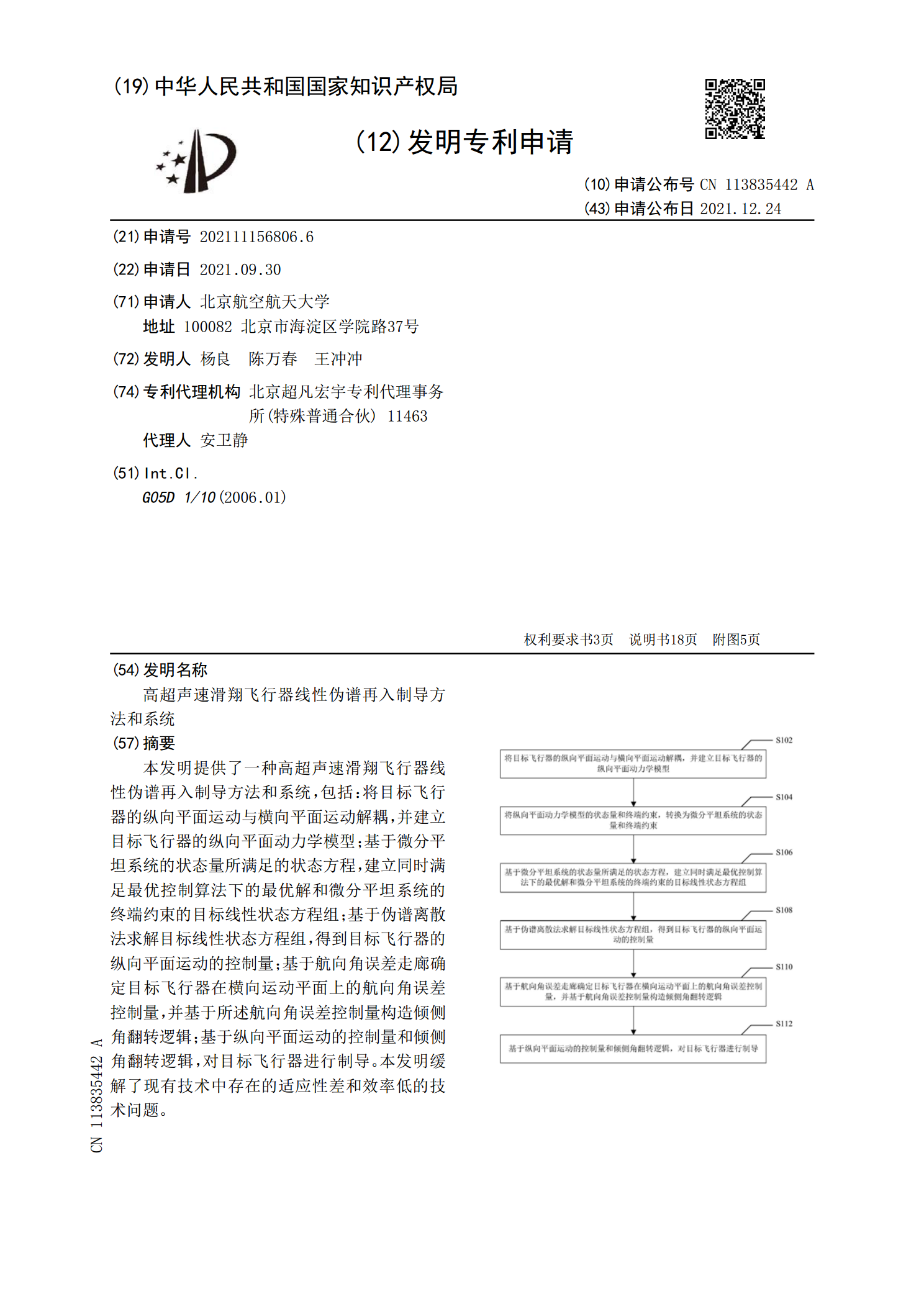
本发明提供了一种高超声速滑翔飞行器线性伪谱再入制导方法和系统,包括:将目标飞行器的纵向平面运动与横向平面运动解耦,并建立目标飞行器的纵向平面动力学模型;基于微分平坦系统的状态量所满足的状态方程,建立同时满足最优控制算法下的最优解和微分平坦系统的终端约束的目标线性状态方程组;基于伪谱离散法求解目标线性状态方程组,得到目标飞行器的纵向平面运动的控制量;基于航向角误差走廊确定目标飞行器在横向运动平面上的航向角误差控制量,并基于所述航向角误差控制量构造倾侧角翻转逻辑;基于纵向平面运动的控制量和倾侧角翻转逻辑,对目

滑翔式再入飞行器弹道优化研究.docx
滑翔式再入飞行器弹道优化研究滑翔式再入飞行器弹道优化研究摘要:随着航天技术的不断发展,滑翔式再入飞行器作为一种具有重要应用价值的再入载具,被广泛研究和应用。本文通过对滑翔式再入飞行器弹道进行优化研究,探讨了弹道参数对飞行器再入过程的影响,并提出了相应的优化策略,为滑翔式再入飞行器的设计和应用提供了理论支持。关键词:滑翔式再入飞行器;弹道优化;飞行器再入;设计应用引言:滑翔式再入飞行器是一种通过大气层再入来降低速度和高温的载具,具有较小的重量和较低的成本。由于其高度灵活的设计,滑翔式再入飞行器在航天领域具有

通用高速飞行器预测校正再入制导方法研究.docx
通用高速飞行器预测校正再入制导方法研究随着科技的飞速发展,通用高速飞行器已经成为人们研究的热点。其具备高速、高效、远航能力,能够进行多种任务,如探测、侦察、运输等,给人们的生活和工作带来了巨大的改变。但是,通用高速飞行器的预测校正再入制导方法是其飞行安全的重要保障,需要我们进行深入研究探讨。一、通用高速飞行器校正再入制导方法的概述通用高速飞行器的校正再入制导方法是保障其飞行安全的重要技术。该技术能够准确计算飞行器的轨迹,通过热保护层、降落伞等系统,保证飞行器在再入过程中不受损坏。通用高速飞行器的校正再入制

类IXV飞行器初期再入制导与姿态控制方法研究.docx
类IXV飞行器初期再入制导与姿态控制方法研究标题:类IXV飞行器初期再入制导与姿态控制方法研究摘要:类IXV飞行器是一款具有再入能力的无人空间飞行器,其再入制导与姿态控制方法对其性能有着重要的影响。本论文旨在研究类IXV飞行器初期再入制导与姿态控制方法,并通过理论推导和实验验证,探究其有效性以及对飞行器性能的影响。首先介绍类IXV飞行器的基本概念和再入特点,紧接着分析再入飞行器的制导与姿态控制需求,并提出相应的方法。随后,通过建立数学模型,设计制导律与姿态控制律,进行仿真验证和参数优化。最后,利用地面实验