
自控飞艇俯仰偏航姿态控制系统设计与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自控飞艇俯仰偏航姿态控制系统设计与实现.docx
自控飞艇俯仰偏航姿态控制系统设计与实现标题:自控飞艇俯仰偏航姿态控制系统设计与实现摘要:本论文旨在设计和实现自控飞艇的俯仰和偏航姿态控制系统。自控飞艇是一种重要的无人驾驶飞行器,具备广泛的应用前景。为了实现飞艇的精确控制,本文将介绍姿态控制的理论基础和方法,并在此基础上设计了一种有效的自控飞艇俯仰和偏航姿态控制系统。通过系统的建模、控制策略的选择以及控制算法的设计和优化,实现了飞艇在不同工况下的准确姿态控制和稳定飞行,提高了整个系统的性能和安全性。关键词:自控飞艇、俯仰姿态、偏航姿态、控制系统、控制算法1

自控飞艇俯仰偏航姿态控制系统设计与实现的开题报告.docx
自控飞艇俯仰偏航姿态控制系统设计与实现的开题报告一、选题依据及意义自控飞艇是一种轻型飞行器,其具有起降方便,飞行稳定性高,适应性强等特点。随着现代科技的不断发展,自控飞艇在轻型飞行器领域中的地位越来越重要。自控飞艇的俯仰偏航姿态控制系统是提高自控飞艇飞行稳定性的重要手段。因此,本课题选择研究自控飞艇俯仰偏航姿态控制系统的设计与实现。该课题的研究意义体现在以下几个方面:1.提高自控飞艇姿态控制精度,提高飞行安全性2.实现自控飞艇对复杂环境的适应性和优化飞行路径3.促进自控飞艇技术的发展和普及二、研究内容本课

基于DSP的飞艇姿态控制系统的设计与实现.docx
基于DSP的飞艇姿态控制系统的设计与实现基于DSP的飞艇姿态控制系统的设计与实现摘要:飞艇是一种具有多种应用领域的无人飞行器,其姿态控制系统对于保持平稳飞行和完成任务显得尤为重要。本文以基于数字信号处理器(DSP)的飞艇姿态控制系统为研究对象,提出了一种基于PID控制算法的飞艇姿态控制方法。通过设计与实现,研究结果表明本系统能够满足飞艇稳定飞行和姿态调整的要求。关键词:飞艇;姿态控制;DSP;PID控制第1章引言近年来,无人飞行器的应用在各个领域都得到了迅速发展,其中包括飞艇。飞艇以其悬停能力和较大载荷容

基于DSP的飞艇姿态控制系统的设计与实现的开题报告.docx
基于DSP的飞艇姿态控制系统的设计与实现的开题报告目录:一、选题的背景和意义二、研究的现状和问题三、研究的目的和内容四、主要的研究方法和步骤五、预期的研究结果和意义六、论文的结构和安排一、选题的背景和意义随着经济的发展和科技的进步,飞艇作为一种新型的无人机,被广泛应用于航空、摄影、测绘等领域。为了能够更好地实现飞艇的航行,需要对其进行姿态控制。因此,基于DSP的飞艇姿态控制系统的设计与实现具有重要的实际意义。二、研究的现状和问题目前,国内外关于飞艇姿态控制系统的研究已经取得了一定的进展。其中,传统的PID
矢量推力系统调整飞行俯仰姿态的平流层飞艇.pdf
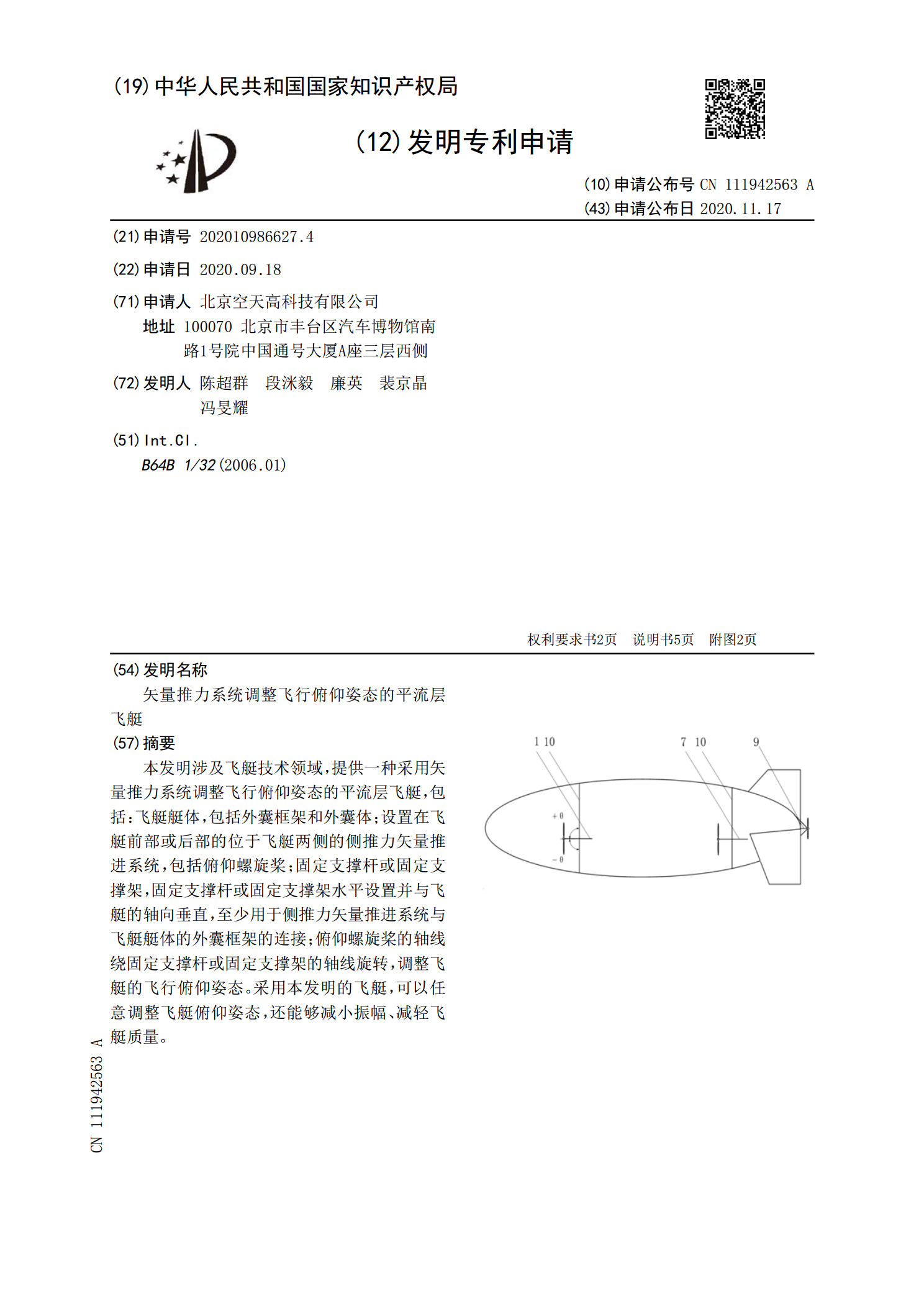
本发明涉及飞艇技术领域,提供一种采用矢量推力系统调整飞行俯仰姿态的平流层飞艇,包括:飞艇艇体,包括外囊框架和外囊体;设置在飞艇前部或后部的位于飞艇两侧的侧推力矢量推进系统,包括俯仰螺旋桨;固定支撑杆或固定支撑架,固定支撑杆或固定支撑架水平设置并与飞艇的轴向垂直,至少用于侧推力矢量推进系统与飞艇艇体的外囊框架的连接;俯仰螺旋桨的轴线绕固定支撑杆或固定支撑架的轴线旋转,调整飞艇的飞行俯仰姿态。采用本发明的飞艇,可以任意调整飞艇俯仰姿态,还能够减小振幅、减轻飞艇质量。