
柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制.docx
柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制摘要:柔性空间机器人是一类具有高柔韧性和机器人化能力的机器人系统。然而,由于其柔性结构的自由度和动态特性的复杂性,控制柔性空间机器人的姿态和振动问题仍然具有挑战性。为了解决这一问题,本论文提出了一种基于关节柔性补偿控制器和虚拟力概念的模糊全局滑模控制方法,以实现柔性空间机器人的稳定控制和振动主动抑制。通过在关节空间和任务空间中引入柔性补偿控制器,可

基于模糊补偿的多关节机器人自适应神经滑模控制.docx
基于模糊补偿的多关节机器人自适应神经滑模控制基于模糊补偿的多关节机器人自适应神经滑模控制摘要:多关节机器人的控制一直是机器人领域中的研究热点之一。本文提出了一种基于模糊补偿的多关节机器人自适应神经滑模控制方法。该方法融合了模糊控制、神经网络以及滑模控制的优点,具有较强的适应性和鲁棒性。通过仿真实验验证了该方法的有效性,结果表明该方法在多关节机器人控制中具有较好的性能。关键词:多关节机器人,模糊补偿,自适应神经滑模控制引言多关节机器人是指具有多个可控制关节的机器人,广泛应用于工业生产、医疗服务、科研等领域。

柔性关节机械臂振动抑制研究.docx
柔性关节机械臂振动抑制研究柔性关节机械臂振动抑制研究摘要:柔性关节机械臂具有较高的自由度和灵活性,但在操作过程中常伴随着振动问题,影响着其精准性和稳定性。本文针对柔性关节机械臂振动抑制问题,从振动机理、振动分析和振动控制等方面进行综述和研究,并提出相应的解决方案。通过分析机械臂振动的来源,可以明确振动问题是由柔性关节系统的固有振动、外界扰动以及非线性特性引起的。在振动分析方面,采用模态分析和有限元分析等方法,识别关键振动模态,并确定振动频率和幅值的特性。在振动控制方面,通过选择合适的控制策略、设计合理的控
一种基于接触力矩补偿的柔性关节空间机器人快速阻抗控制方法.pdf
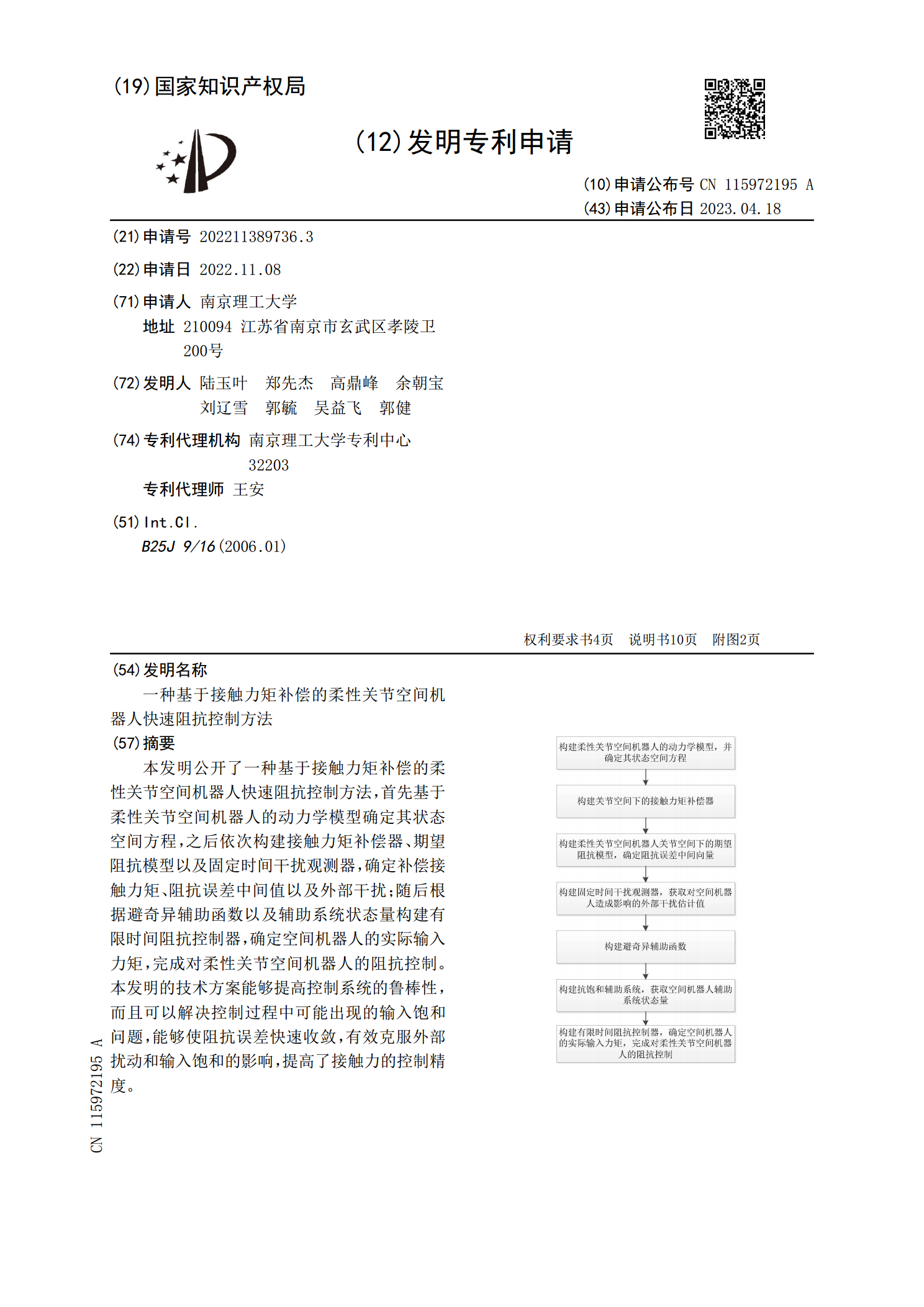
本发明公开了一种基于接触力矩补偿的柔性关节空间机器人快速阻抗控制方法,首先基于柔性关节空间机器人的动力学模型确定其状态空间方程,之后依次构建接触力矩补偿器、期望阻抗模型以及固定时间干扰观测器,确定补偿接触力矩、阻抗误差中间值以及外部干扰;随后根据避奇异辅助函数以及辅助系统状态量构建有限时间阻抗控制器,确定空间机器人的实际输入力矩,完成对柔性关节空间机器人的阻抗控制。本发明的技术方案能够提高控制系统的鲁棒性,而且可以解决控制过程中可能出现的输入饱和问题,能够使阻抗误差快速收敛,有效克服外部扰动和输入饱和的影

基于压电作动器MFC的柔性梁振动主动控制.docx
基于压电作动器MFC的柔性梁振动主动控制摘要:本文提出了一种基于压电作动器MFC的柔性梁振动主动控制方法。本文首先介绍了采用压电作动器MFC对柔性梁进行振动控制的原理及优缺点。然后,针对柔性梁振动控制的实验条件和控制要求进行了研究。本文采用PID控制算法,并在MATLAB/Simulink中进行了数值模拟,并在柔性梁振动控制试验平台上对控制方法进行了实验验证。实验结果表明,本文提出的基于压电作动器MFC的柔性梁振动主动控制方法能够有效地控制柔性梁的振动,具有较好的控制效果。关键词:压电作动器MFC;柔性梁