
带锯机送料平台姿态仿真及补偿控制研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

带锯机送料平台姿态仿真及补偿控制研究.docx
带锯机送料平台姿态仿真及补偿控制研究带锯机送料平台姿态仿真及补偿控制研究摘要:带锯机是一种重要的工业设备,用于木材的切割加工。随着数字化和自动化技术的发展,对带锯机的性能和精度要求越来越高。本文针对带锯机的送料平台姿态进行仿真与补偿控制的研究,通过建立带锯机的数学模型,初步模拟实际的送料平台姿态,并提出一种补偿控制策略,以提高带锯机的精度和稳定性。关键词:带锯机,仿真,补偿控制,姿态1.引言带锯机是一种常用的木材加工设备,广泛应用于家具制造、建筑材料加工等领域。带锯机的性能直接关系到木材的切割效果和产量。
圆锯机送料台.pdf
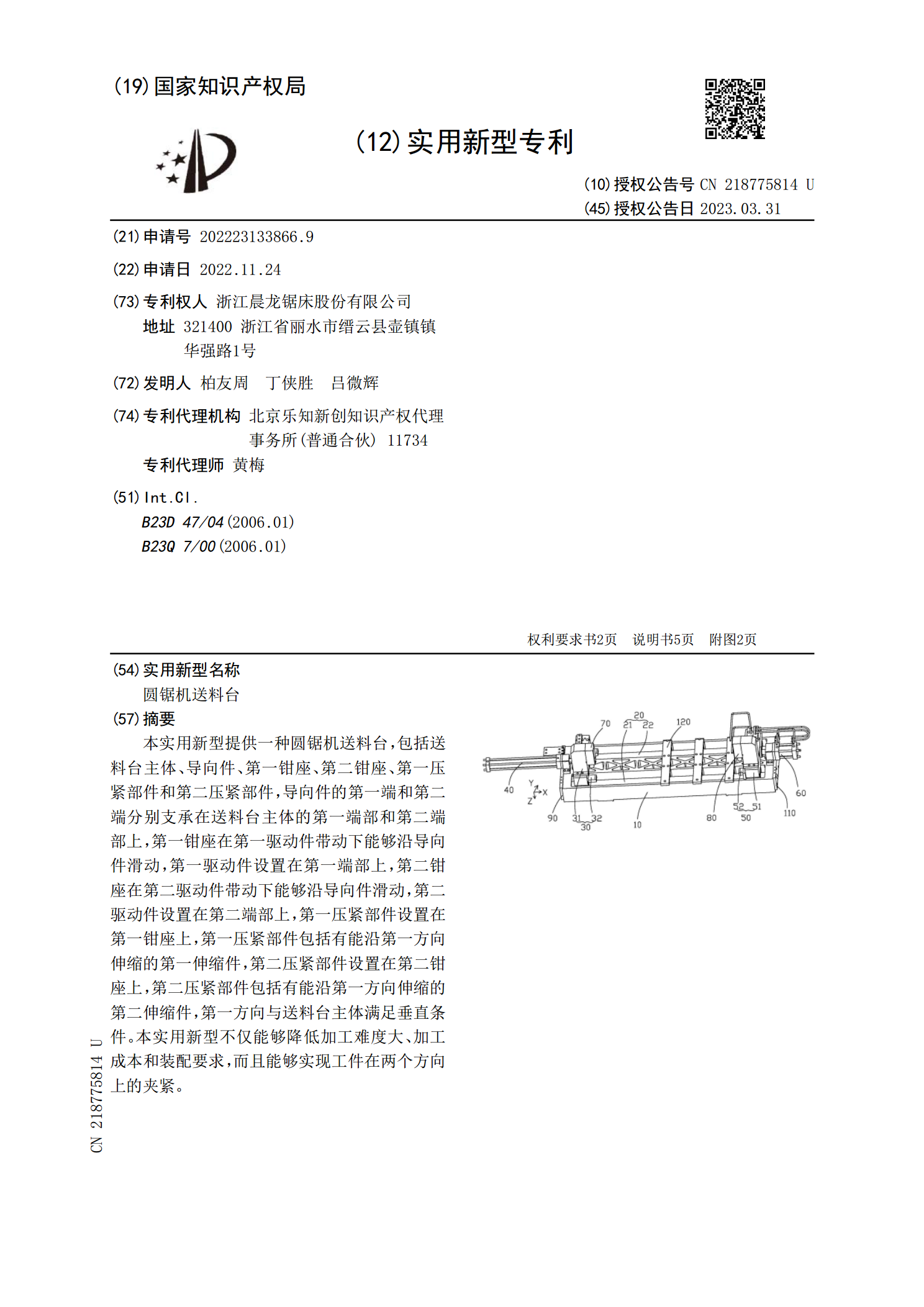
本实用新型提供一种圆锯机送料台,包括送料台主体、导向件、第一钳座、第二钳座、第一压紧部件和第二压紧部件,导向件的第一端和第二端分别支承在送料台主体的第一端部和第二端部上,第一钳座在第一驱动件带动下能够沿导向件滑动,第一驱动件设置在第一端部上,第二钳座在第二驱动件带动下能够沿导向件滑动,第二驱动件设置在第二端部上,第一压紧部件设置在第一钳座上,第一压紧部件包括有能沿第一方向伸缩的第一伸缩件,第二压紧部件设置在第二钳座上,第二压紧部件包括有能沿第一方向伸缩的第二伸缩件,第一方向与送料台主体满足垂直条件。本实用

基于Labview的飞行姿态控制仿真平台研究.docx
基于Labview的飞行姿态控制仿真平台研究基于LabVIEW的飞行姿态控制仿真平台研究摘要:飞行姿态控制是飞行器设计中至关重要的一部分。本文基于LabVIEW平台,研究了一种飞行姿态控制仿真平台的设计和实现。该平台结合了姿态控制理论和仿真技术,实现了对飞行器在不同飞行状态下的姿态控制仿真。通过该平台的使用,可以有效地验证和优化飞行姿态控制系统的性能,提高飞行器的安全性和稳定性。关键词:飞行姿态控制;LabVIEW;仿真平台;安全性;稳定性;性能优化引言:在飞行器设计和运行过程中,飞行姿态控制是一个非常关

数控圆锯机送料台机构.pdf
一种数控圆锯机送料台机构,包括:送料台基座部分、移动夹头部分和滚轮架,其中:滚轮架包括:油缸安装座、翻转油缸、油缸接头、托料连接板、轴套安装板、轴套组、连接板、上限位块、托料板机构、连接底座和下限位块。本发明结构稳当,翻转送料过程顺畅。

AGV顶升平台姿态控制及仿真分析.docx
AGV顶升平台姿态控制及仿真分析概述AGV顶升平台姿态控制是指在AGV运动时,通过调节顶升平台的姿态来实现运动过程的平稳和稳定。本文针对AGV顶升平台姿态控制及其仿真分析展开讨论。一、AGV顶升平台姿态控制的原理AGV顶升平台姿态控制的主要原理包括控制系统、传感器、执行器和姿态调节算法等方面。其中,控制系统主要负责控制AGV的运动过程,传感器则通过采集AGV运动状态的参数信息,执行器实现姿态调节算法。在AGV运动过程中,顶升平台姿态控制的实现需要依赖多种传感器来实时获取AGV的运动状态和姿态,例如加速度计