
基于速度观测的双余度电液舵机系统容错同步控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于速度观测的双余度电液舵机系统容错同步控制.docx
基于速度观测的双余度电液舵机系统容错同步控制引言电液舵机系统是目前大型船舶和飞机控制的主要动力装置之一,其工作可靠性和安全性直接关系到船舶和飞机的使用效果和安全性。然而,电液舵机系统存在许多问题,比如电液舵机锁死导致飞机或船舶无法控制,此时漏油管道发现漏油,但由于系统容错特性不足,锁死问题无法及时得到解决,造成严重的后果。因此,提高电液舵机系统的容错性和同步性是目前研究中的重点之一。基于速度观测的双余度电液舵机系统(DLECS)是近年来电液舵机系统容错同步控制的一项重要研究成果。本文将针对该系统进行研究和

双余度电动伺服舵机系统设计.docx
双余度电动伺服舵机系统设计双余度电动伺服舵机系统设计摘要:本文主要讨论了双余度电动伺服舵机系统的设计和实现。在航空航天、机器人、自动化等众多领域,伺服系统的应用非常广泛。通过使用双余度电动伺服舵机系统,可以实现高精度、高速度的控制,能够适用于多种场合。本文介绍了双余度电动伺服舵机系统的理论原理,控制方式和设计细节,同时对系统进行了性能测试,验证了系统的可行性。关键词:双余度、伺服舵机、控制系统、性能测试。1.绪论伺服系统作为一种控制系统,广泛应用于工业自动化、机器人等领域。伺服系统通过控制执行机构的位置和

双余度电动舵机系统的研究与设计.docx
双余度电动舵机系统的研究与设计双余度电动舵机系统的研究与设计摘要:双余度电动舵机系统是目前广泛应用于飞行器、船舶等领域的一种舵机系统,本文通过对双余度电动舵机系统的组成、工作原理、优缺点以及设计方法等方面进行论述,旨在深入探讨其在实际应用中的表现以及未来的发展方向。一、引言随着现代科技的不断进步,许多设备的要求越来越高,其中机电一体化技术的发展推动了舵机技术的升级,电动舵机逐渐取代了传统机械舵机,成为飞行器、船舶等领域的重要部件。双余度电动舵机系统是其中性能较为优秀的一种,本文将从以下方面进行论述:系统组
一种基于CAN总线的两余度舵机控制系统.pdf
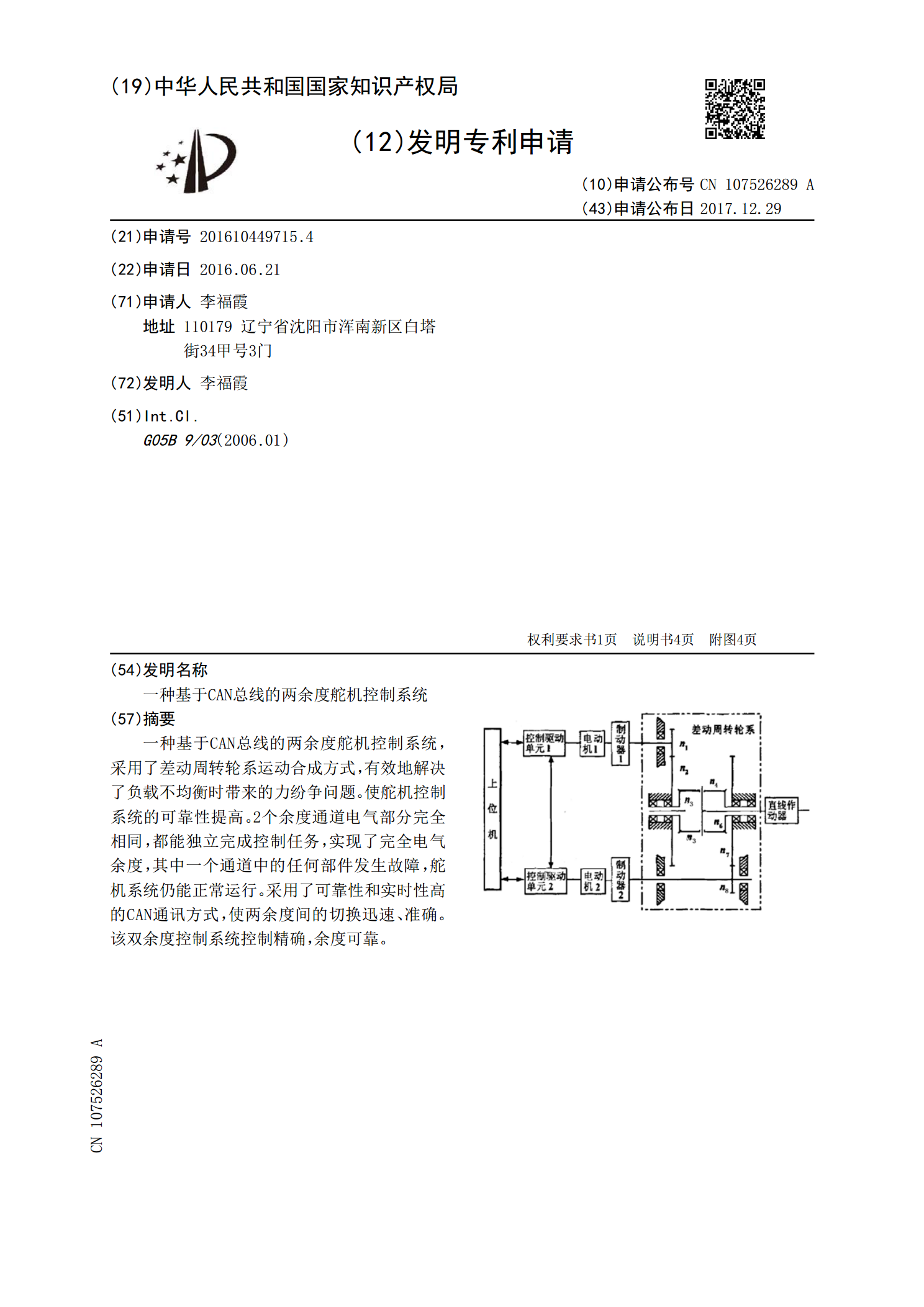
一种基于CAN总线的两余度舵机控制系统,采用了差动周转轮系运动合成方式,有效地解决了负载不均衡时带来的力纷争问题。使舵机控制系统的可靠性提高。2个余度通道电气部分完全相同,都能独立完成控制任务,实现了完全电气余度,其中一个通道中的任何部件发生故障,舵机系统仍能正常运行。采用了可靠性和实时性高的CAN通讯方式,使两余度间的切换迅速、准确。该双余度控制系统控制精确,余度可靠。

带温度补偿的双余度舵机伺服控制算法研究.docx
带温度补偿的双余度舵机伺服控制算法研究摘要:本文以带温度补偿的双余度舵机伺服控制算法为研究对象,对该算法从原理、实现和效果等方面进行了深入的论述分析。首先,介绍了舵机伺服控制的基本原理和双余度舵机的结构特性,并针对温度对舵机控制精度产生的影响进行了讨论。然后,详细阐述了带温度补偿的双余度舵机伺服控制算法的理论基础、控制策略、参数优化和实现方法,并介绍了该算法的具体应用效果。最后,对该算法存在的问题和未来的发展方向进行了展望。关键词:双余度舵机;伺服控制;温度补偿;控制算法1.引言随着机器人、智能家居、无人