
基于多重渐消因子强跟踪非线性滤波的故障参数联合估计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多重渐消因子强跟踪非线性滤波的故障参数联合估计.docx
基于多重渐消因子强跟踪非线性滤波的故障参数联合估计基于多重渐消因子强跟踪非线性滤波的故障参数联合估计摘要:随着先进科技的不断发展,故障参数联合估计在工程领域中的应用变得越来越重要。其中,多重渐消因子强跟踪非线性滤波是一种有效的方法。本文将详细介绍多重渐消因子强跟踪非线性滤波,并深入探讨其在故障参数联合估计中的应用。第一部分:引言介绍了故障参数联合估计的重要性,及目前多重渐消因子强跟踪非线性滤波在该领域中的应用。第二部分:多重渐消因子强跟踪非线性滤波的原理及算法详细介绍多重渐消因子强跟踪非线性滤波的基本原理

基于多重次渐消因子的强跟踪UKF姿态估计.docx
基于多重次渐消因子的强跟踪UKF姿态估计摘要本文就基于多重次渐消因子的强跟踪UKF姿态估计算法进行了深入研究和探讨。首先,对姿态估计、UKF算法以及多重次渐消因子进行了简要介绍。接着,详细介绍了该算法的原理和实现方法,并结合实验结果进行了分析和讨论。结果表明,该算法具有很好的跟踪稳定性和鲁棒性,可以有效地提高姿态估计的准确性和鲁棒性,具有很好的应用价值和发展前景。关键词:姿态估计;UKF算法;多重次渐消因子;强跟踪;鲁棒性1.引言在现代的航空航天、机器人和自动驾驶等领域中,姿态估计是一项非常关键的技术。姿
基于强跟踪滤波算法的轨道车辆悬吊系统参数估计方法.pdf
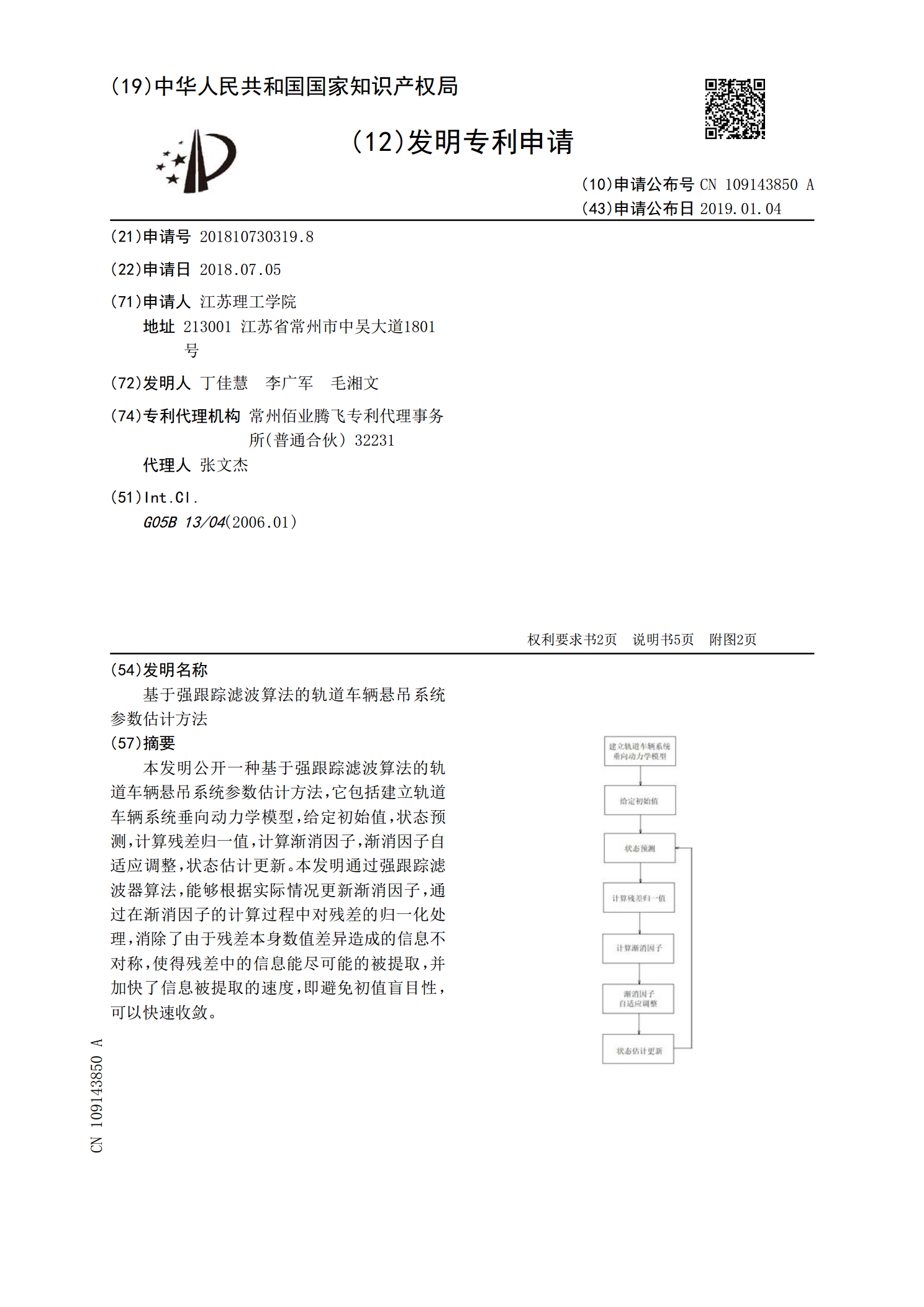
本发明公开一种基于强跟踪滤波算法的轨道车辆悬吊系统参数估计方法,它包括建立轨道车辆系统垂向动力学模型,给定初始值,状态预测,计算残差归一值,计算渐消因子,渐消因子自适应调整,状态估计更新。本发明通过强跟踪滤波器算法,能够根据实际情况更新渐消因子,通过在渐消因子的计算过程中对残差的归一化处理,消除了由于残差本身数值差异造成的信息不对称,使得残差中的信息能尽可能的被提取,并加快了信息被提取的速度,即避免初值盲目性,可以快速收敛。

基于粒子滤波的参数和状态联合估计算法设计及实现.docx
基于粒子滤波的参数和状态联合估计算法设计及实现一、引言随着科技的发展,粒子滤波在参数和状态联合估计领域中得到了广泛的应用。本文将介绍粒子滤波的原理和应用,以及基于粒子滤波的参数和状态联合估计算法的设计和实现。二、粒子滤波原理粒子滤波是一种计算贝叶斯滤波的方法,其可以处理非线性非高斯的系统。粒子滤波通过随机抽样滤波算法,实现对状态空间模型的计算机求解,是一种基于蒙特卡罗采样的迭代求解方法。粒子滤波的基本思想是,利用粒子代替整个状态空间,以此模拟概率密度函数,并通过粒子的重新采样来逐步优化粒子的分布,使其接近

基于粒子滤波的非线性设备状态估计.docx
基于粒子滤波的非线性设备状态估计本文将介绍基于粒子滤波的非线性设备状态估计算法,并对其原理、应用和优劣进行分析。首先,我们将简要介绍设备状态估计的定义和意义,随后,我们将详细阐述粒子滤波算法及其特点。最后,我们将探讨基于粒子滤波的非线性设备状态估计的应用并总结其优劣。一、设备状态估计的定义和意义设备状态估计是指通过对设备的输入和输出进行观测和测量,推断出设备当前状态的技术。在实际应用中,设备状态估计广泛应用于多个领域,如物体跟踪、机器人运动控制、无人驾驶车辆导航等。经过设备状态估计算法对设备状态进行估算后