
基于背景建模的桥式吊车负载摆角测量算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于背景建模的桥式吊车负载摆角测量算法.docx
基于背景建模的桥式吊车负载摆角测量算法基于背景建模的桥式吊车负载摆角测量算法摘要:桥式吊车在工业和建筑领域中广泛应用于重物起升和移动。为了保证操纵和操作的安全性,准确测量桥式吊车负载摆角是重要的任务。本文提出了一种基于背景建模的桥式吊车负载摆角测量算法,该算法利用摄像头捕捉到的视频序列进行背景建模和目标检测,然后通过图像处理算法计算出目标物体的摆角。实验结果表明,该算法能够准确测量出桥式吊车负载的摆角,为操纵吊车提供了一个重要的参考。关键词:桥式吊车,负载摆角,背景建模,目标检测,图像处理一、引言桥式吊车
一种在复杂背景下的吊车负载摆角测量方法.pdf
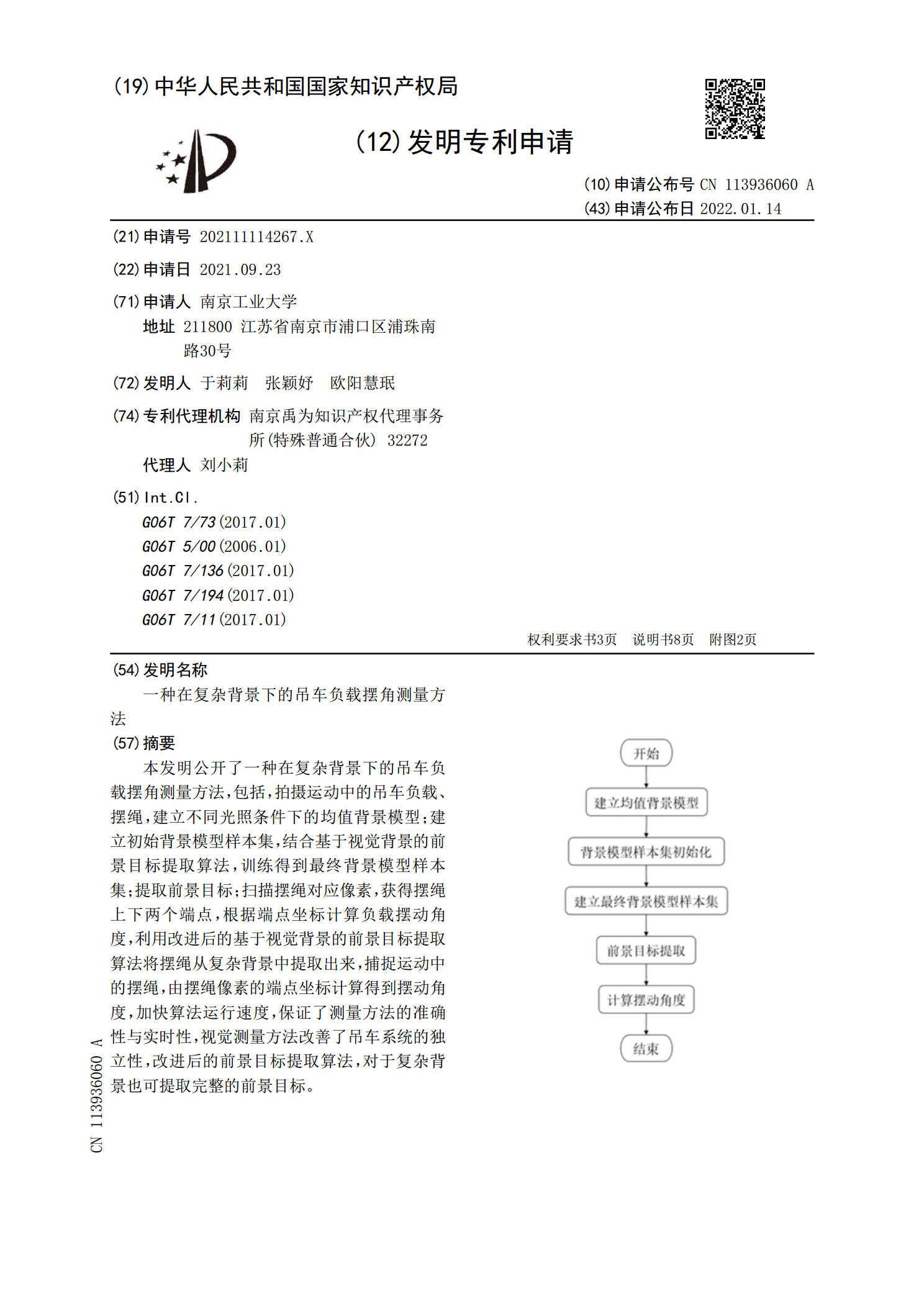
本发明公开了一种在复杂背景下的吊车负载摆角测量方法,包括,拍摄运动中的吊车负载、摆绳,建立不同光照条件下的均值背景模型;建立初始背景模型样本集,结合基于视觉背景的前景目标提取算法,训练得到最终背景模型样本集;提取前景目标;扫描摆绳对应像素,获得摆绳上下两个端点,根据端点坐标计算负载摆动角度,利用改进后的基于视觉背景的前景目标提取算法将摆绳从复杂背景中提取出来,捕捉运动中的摆绳,由摆绳像素的端点坐标计算得到摆动角度,加快算法运行速度,保证了测量方法的准确性与实时性,视觉测量方法改善了吊车系统的独立性,改进后

带初始负载摆角及台车位移的桥式吊车误差跟踪器及方法.pdf
本发明公开了一种带初始负载摆角及台车位移的桥式吊车误差跟踪器及方法,包括:建立欠驱动桥式吊车系统初始动力学模型;给定期望台车误差轨迹、期望摆角误差轨迹;确定台车定位、负载摆动的误差跟踪信号;得到欠驱动桥式吊车系统误差跟踪动力学模型;构造能够使Lyapunov函数稳定的目标系统模型,根据所述目标系统模型以及欠驱动桥式吊车系统误差跟踪动力学模型求取带初始负载摆角及台车位移的桥式吊车误差跟踪器;本发明有益效果:本发明在放宽常规控制方法的初始负载摆角以及初始台车位移为0的条件下,允许负载的初始摆角以及台车的初始位

基于LQR算法的三维桥式吊车定位及防摆控制研究.docx
基于LQR算法的三维桥式吊车定位及防摆控制研究摘要:桥式吊车是一种广泛应用于工业领域的重型起重设备,其精确的定位和防摆控制对于保证安全和提高工作效率至关重要。本论文以基于LQR算法的三维桥式吊车定位及防摆控制为研究课题,通过分析桥式吊车的系统结构和动力学模型,设计了LQR控制器,并进行了仿真实验验证其有效性。研究结果表明,LQR控制器能够实现桥式吊车的精确定位和有效防摆控制,具有较高的控制精度和鲁棒性。关键词:桥式吊车,定位控制,防摆控制,LQR算法,控制精度一、引言桥式吊车是一种用于重型起重作业的设备,

膜计算优化算法的桥式吊车建模研究的开题报告.docx
膜计算优化算法的桥式吊车建模研究的开题报告开题报告:膜计算优化算法的桥式吊车建模研究背景和意义:桥式吊车是工业生产中常见的起重工具,其主要功能为搬运重物,提高生产效率。但是,桥式吊车的运行存在着复杂的动力学和控制问题。因此,研究桥式吊车的建模和控制方法具有重要的理论意义和应用价值。膜计算是一种新兴的计算方法,该方法基于膜结构对信息进行处理,具有低能耗和高并行性等特点。将膜计算方法应用于桥式吊车建模和控制,可以有效避免传统方法中的计算瓶颈问题。因此,本文将研究膜计算优化算法的桥式吊车建模方法,为桥式吊车的控