
基于正交测光的双轴太阳能自动跟踪系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于正交测光的双轴太阳能自动跟踪系统设计.docx
基于正交测光的双轴太阳能自动跟踪系统设计设计基于正交测光的双轴太阳能自动跟踪系统摘要:太阳能是一种清洁、可再生的能源源泉,广泛应用于各个领域。然而,太阳能发电效率受到太阳光入射角度的影响。因此,为了最大化太阳能的吸收效率,设计一种基于正交测光的双轴太阳能自动跟踪系统是非常必要的。本论文旨在通过详细介绍系统的硬件组成、跟踪算法和控制策略,为读者提供关于该系统设计和实现的完整指南。1.引言近年来,随着全球能源紧张和电能成本的增加,太阳能作为一种清洁、可再生的能源逐渐受到广泛关注。然而,太阳能的利用效率受到太阳

基于单片机的双轴太阳能自动跟踪系统设计.docx
基于单片机的双轴太阳能自动跟踪系统设计随着人们对清洁能源的需求日益增长,太阳能作为一种清洁,可再生的能源正逐渐成为人们的选择。太阳能光伏发电系统能够利用太阳能转化电能,但是它们仅有在面向太阳辐射时才能发挥最大效能。因此,太阳能跟踪系统能够解决这个问题,提高太阳能光伏系统的发电效率。本文将重点介绍一种基于单片机的双轴太阳能自动跟踪系统设计。一、设计方案描述本设计方案基于单片机,采用双轴跟踪方式,通过测量太阳位置的角度和面积,控制转台的水平和垂直方向转动,使太阳能板始终朝向太阳,以最大化发电量。以下是该系统的
太阳能双轴自动跟踪光伏电站支架.pdf
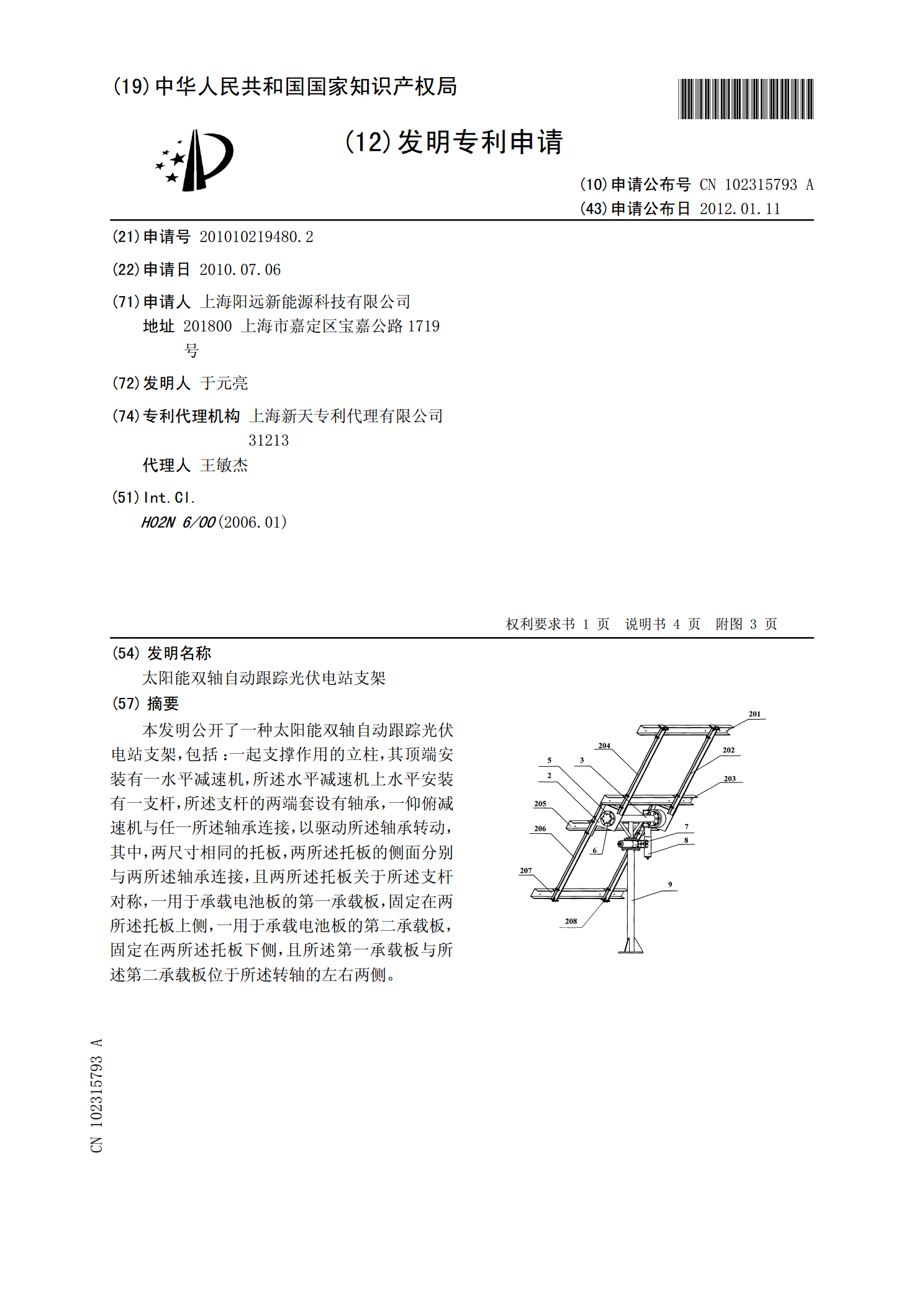
本发明公开了一种太阳能双轴自动跟踪光伏电站支架,包括:一起支撑作用的立柱,其顶端安装有一水平减速机,所述水平减速机上水平安装有一支杆,所述支杆的两端套设有轴承,一仰俯减速机与任一所述轴承连接,以驱动所述轴承转动,其中,两尺寸相同的托板,两所述托板的侧面分别与两所述轴承连接,且两所述托板关于所述支杆对称,一用于承载电池板的第一承载板,固定在两所述托板上侧,一用于承载电池板的第二承载板,固定在两所述托板下侧,且所述第一承载板与所述第二承载板位于所述转轴的左右两侧。

一种半自动双轴跟踪太阳能光伏发电系统.pdf
本发明公开了一种半自动双轴跟踪太阳能光伏发电系统,包括太阳能电池板、可调节支架、传动装置、太阳方位显示盒、跟踪器等,其中可调节支架主要由钢管构成,通过插销实现支架与半圆型支杆固定,通过用脚手架装配件实现支架整体安装,电池板固定框上有半圆型支杆,在大风天气时,用限位销进行固定,传动带与传力杆活动连接,实现同步转动,传动装置由马达、齿轮、链条组成,马达的控制信号由跟踪器提供,太阳方位显示盒的顶部有孔,用于光线射入盒子底部形成光斑,通过调节半圆型支杆使得光斑在“十”字型标记交叉点上,实现太阳方位的双轴跟踪,太阳

双轴光伏电池自动跟踪系统的研制.doc
双轴光伏电池自动跟踪系统的研制.txt大人物的悲哀在于他们需要不停地做出选择;而小人物的悲哀在于他们从来没有选择的机会。男人因沧桑而成熟,女人因成熟而沧桑。男人有了烟,有了酒,也就有了故事;女人有了钱,有了资色,也就有了悲剧。本文由511313651贡献pdf文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。任伟宋涛如:守,这些化电节的三极三极引起光照再通一侧管又西、间距统的可以的密00≯旃惫蹈《东蕊妻孽嚣;*§三、电机控制电路控制电路如图2所示。Q和为西朝向光敏三极管,当其被