
基于概率量度的机械臂视觉伺服目标捕获运动规划方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于概率量度的机械臂视觉伺服目标捕获运动规划方法.docx
基于概率量度的机械臂视觉伺服目标捕获运动规划方法基于概率量度的机械臂视觉伺服目标捕获运动规划方法摘要:机械臂视觉伺服技术在工业自动化领域有着广泛的应用,目标捕获运动规划是其中的重要环节。本文提出了一种基于概率量度的机械臂视觉伺服目标捕获运动规划方法。该方法通过对目标位置的概率量度进行建模,并结合机械臂运动学模型,实现了高效、准确的目标捕获运动规划。实验结果表明,该方法在目标捕获任务中具有良好的性能和实用性。关键词:机械臂;视觉伺服;目标捕获;运动规划;概率量度1.引言机械臂在工业自动化领域有着广泛的应用,

基于视觉伺服的机械臂控制方法研究的任务书.docx
基于视觉伺服的机械臂控制方法研究的任务书一、选题背景随着工业自动化技术的飞速发展,机械臂已经被广泛应用于制造业、物流、医疗、军事等领域。机械臂控制技术是机械臂应用的关键,其中基于视觉伺服的机械臂控制方法是目前较为热门的研究方向。基于视觉伺服的机械臂控制方法,是通过采集摄像头拍摄的物体图像,对图像进行处理,获取物体的位置、角度等信息,再将这些信息反馈给机械臂控制系统,实现对机械臂的精准控制。这种方法为机械臂的控制提供了更加准确、可靠的手段,具有广阔的应用前景。二、选题意义随着自动化生产技术的不断提升,基于视

基于视觉伺服的机械臂精确运动控制研究的任务书.docx
基于视觉伺服的机械臂精确运动控制研究的任务书一、研究背景机械臂作为一种具有高自由度的智能化机器人,已经得到了广泛的应用。然而,机械臂在实际应用中需要完成许多高精度、复杂的任务,例如工业生产中的精密加工、医疗行业中的手术操作等,这就需要机械臂具备精确的运动控制能力。因此,基于视觉伺服的机械臂精确运动控制成为了机械臂研究领域的一个热门问题。二、研究内容及目标本研究旨在基于视觉伺服技术,实现机械臂精确运动控制,具体包括以下研究内容:1.机械臂建模和控制算法设计:根据机械臂的结构和运动学性质,对其进行逆运动学建模

基于双目视觉的伺服机械臂运动控制研究的开题报告.docx
基于双目视觉的伺服机械臂运动控制研究的开题报告一、选题背景与意义随着现代工业的发展,越来越多的机器人被应用于生产制造和服务行业。伺服机械臂作为工业机器人的重要组成部分,在工业生产线上的应用越来越广泛。而机器人的运动控制技术则是影响机器人性能和有效实现任务的关键因素。目前,机器人的运动控制技术主要有两种方法,一种是基于伺服系统的编码器反馈控制,另一种是基于视觉反馈控制。然而伺服系统需要对编码器进行定位,误差较大,而且需预先制定规划路径,对动态变化场景难以应付;而视觉反馈控制适用于动态场景,但对于噪声和纹理不
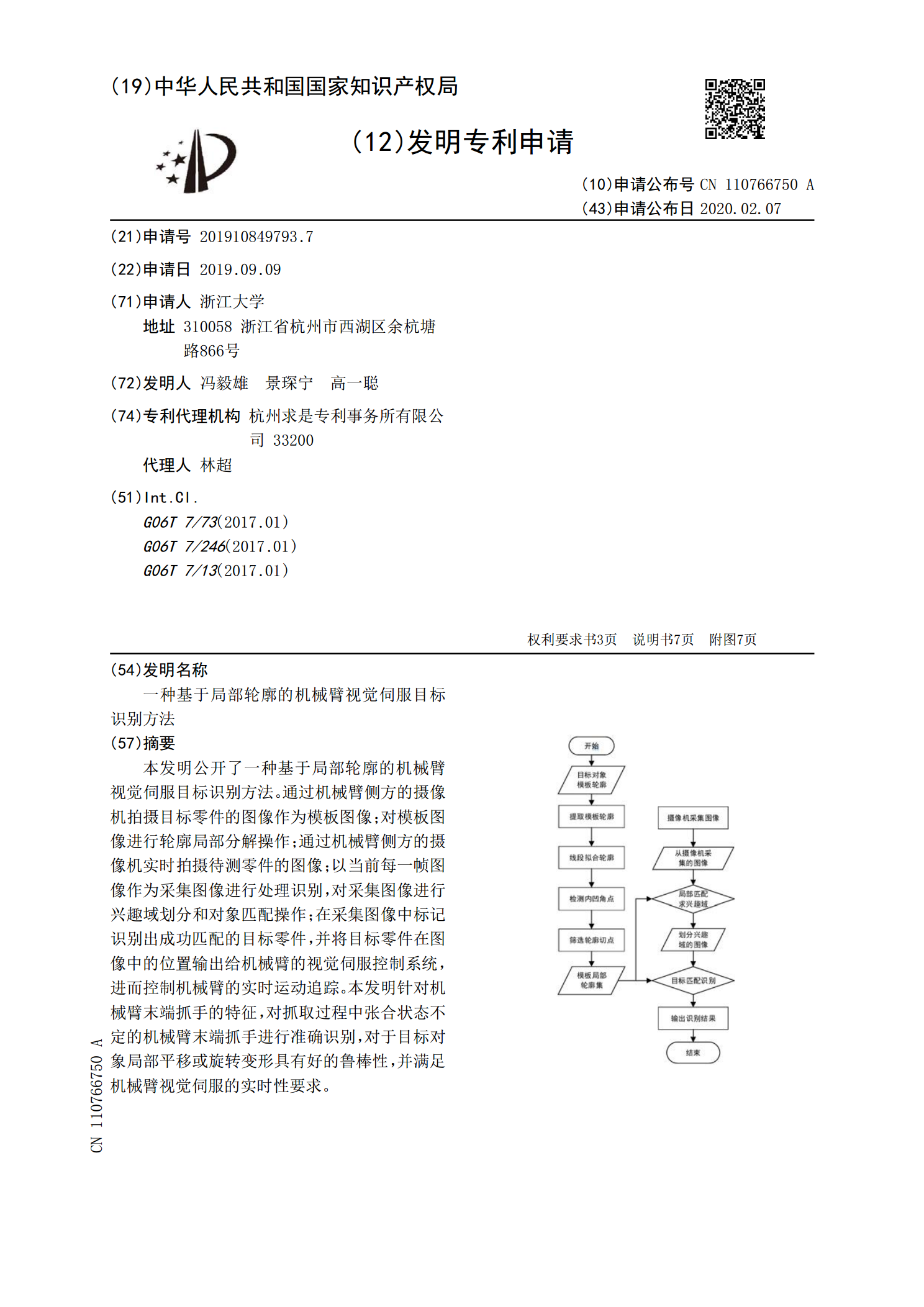
一种基于局部轮廓的机械臂视觉伺服目标识别方法.pdf
本发明公开了一种基于局部轮廓的机械臂视觉伺服目标识别方法。通过机械臂侧方的摄像机拍摄目标零件的图像作为模板图像;对模板图像进行轮廓局部分解操作;通过机械臂侧方的摄像机实时拍摄待测零件的图像;以当前每一帧图像作为采集图像进行处理识别,对采集图像进行兴趣域划分和对象匹配操作;在采集图像中标记识别出成功匹配的目标零件,并将目标零件在图像中的位置输出给机械臂的视觉伺服控制系统,进而控制机械臂的实时运动追踪。本发明针对机械臂末端抓手的特征,对抓取过程中张合状态不定的机械臂末端抓手进行准确识别,对于目标对象局部平移或