
基于混沌蜂群算法的USV路径规划.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于混沌蜂群算法的USV路径规划.docx
基于混沌蜂群算法的USV路径规划摘要:本文提出了一种基于混沌蜂群算法的无人艇路径规划方法。首先,通过分析海洋环境参数和任务需求,确定了无人艇的起点和终点,并确定了任务区域。然后,利用混沌蜂群算法进行优化路径规划。该算法包括基本的人工蜂群算法和混沌搜索算法,通过引入混沌映射和随机因子实现个体间的随机搜索,增强算法的全局搜索能力和收敛速度。最后,通过数值模拟实验验证该方法的有效性和优越性。关键词:混沌蜂群算法;无人艇;路径规划;海洋环境Introduction随着无人艇(UnmannedSurfaceVehi
基于混沌反向策略的蜂群改进算法.pdf
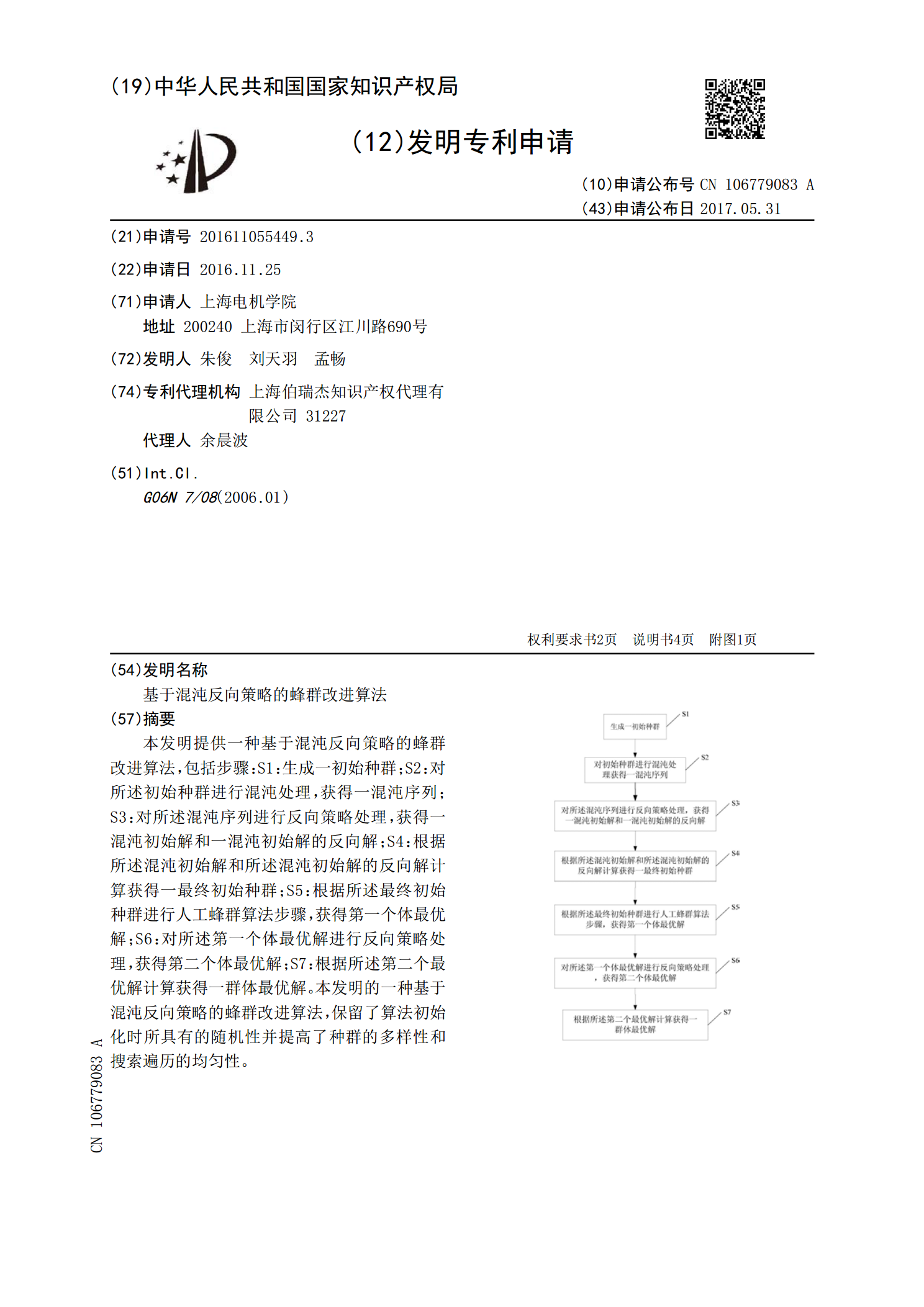
本发明提供一种基于混沌反向策略的蜂群改进算法,包括步骤:S1:生成一初始种群;S2:对所述初始种群进行混沌处理,获得一混沌序列;S3:对所述混沌序列进行反向策略处理,获得一混沌初始解和一混沌初始解的反向解;S4:根据所述混沌初始解和所述混沌初始解的反向解计算获得一最终初始种群;S5:根据所述最终初始种群进行人工蜂群算法步骤,获得第一个体最优解;S6:对所述第一个体最优解进行反向策略处理,获得第二个体最优解;S7:根据所述第二个最优解计算获得一群体最优解。本发明的一种基于混沌反向策略的蜂群改进算法,保留了算

基于改进蜂群算法的无人机路径规划.pptx
基于改进蜂群算法的无人机路径规划01添加章节标题无人机路径规划概述无人机路径规划的定义和重要性无人机路径规划的常见算法改进蜂群算法的原理及应用蜂群算法的基本原理改进蜂群算法的主要思路改进蜂群算法在无人机路径规划中的应用基于改进蜂群算法的无人机路径规划实现路径规划问题的数学模型改进蜂群算法的步骤和流程无人机路径规划的实验结果及分析与其他算法的比较和分析与传统路径规划算法的比较与其他智能优化算法的比较优缺点分析及改进方向实际应用及未来展望无人机路径规划在军事、民用领域的应用前景未来研究方向和技术发展趋势感谢观

基于BDS的USV路径规划研究.docx
基于BDS的USV路径规划研究随着无人技术的普及,无人水面船(USV)越来越受到关注。USV具有高度自主的特点,可以在复杂的水面环境中完成各种任务,例如水文测量、海上巡逻、货运和救援等。在这些应用场景中,路径规划技术是一项至关重要的任务,它可以使USV在不同的水面环境中实现精准和高效的移动。本论文将探讨基于BDS(BeidouNavigationSatelliteSystem)的USV路径规划技术。1.BDS的特点和应用BDS是中国的全球导航卫星系统,是世界上第三个完全独立运行的卫星导航系统。BDS由一系

USV路径规划算法的研究的开题报告.docx
USV路径规划算法的研究的开题报告一、选题背景随着无人技术的发展和应用,无人船的规模越来越大,功能越来越多,但无人船的自主导航技术仍面临很多的挑战,其中之一就是良好的路径规划算法。路径规划算法作为无人船自主导航的关键部分,可以根据环境的已有和采用传感器捕获的信息发现最优的路径。本文提出一种USV路径规划算法的研究,旨在解决路径规划在复杂环境下飞行中遇到的问题,提高无人船的自主导航能力。二、研究目的和意义无人船的自主导航技术的发展需要高效的路径规划算法。传统的路径规划算法在面对复杂环境时无法满足要求,所以需