
基于UUV的拖曳线列阵声纳目标探测关键技术研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于UUV的拖曳线列阵声纳目标探测关键技术研究的任务书.docx
基于UUV的拖曳线列阵声纳目标探测关键技术研究的任务书任务书一、任务背景和目标随着海洋资源的日益开发和利用,对海洋环境和海底资源的准确探测和识别需求越来越迫切。拖曳线列阵声纳技术以其高分辨率、宽频带特性在海洋探测中具有广泛应用前景。本任务旨在研究基于无人水下航行器(UUV)的拖曳线列阵声纳目标探测关键技术,为海洋资源的准确探测提供有效手段。二、任务内容1.建立基于UUV的拖曳线列阵声纳目标探测的技术框架。2.研究拖曳线列阵声纳的信号处理算法,包括波束形成、目标检测和目标定位等关键技术。3.设计并制作适用于

基于UUV的拖曳线列阵声纳目标探测关键技术研究的开题报告.docx
基于UUV的拖曳线列阵声纳目标探测关键技术研究的开题报告一、研究背景随着海洋勘探与开发的不断深入,海洋资源的开发和利用已经成为当前研究的热点。声纳探测技术是进行海洋环境调查、水下目标识别及监视的重要手段。而拖曳线列阵声纳是目前海洋声学探测中使用非常广泛的方法之一,它能够提供高分辨率的海洋环境数据和目标探测信息。同时,为了实现更高效、更准确的海洋勘探和开发,自主水下机器人(UUV)的应用已经成为近年来的研究热点之一。UUV可以在海洋中进行长时间持续监测和调查,为海洋环境及资源分布调查提供了全新的手段。本研究

基于拖曳线列阵声纳与ARPA雷达的目标分选.docx
基于拖曳线列阵声纳与ARPA雷达的目标分选目标分选是海洋声纳与雷达技术中的重要问题之一,对于实现有效的目标探测、定位和跟踪具有重要意义。本文将重点探讨基于拖曳线列阵声纳与ARPA雷达的目标分选方法及其在海洋领域的应用。一、背景和意义海洋是人类的重要资源领域,海上交通运输、渔业、石油、天然气勘探开发等活动日益增多,对海洋环境的监测和保护需求迫切。而海洋中存在各种各样的目标,如船只、潜艇等,目标分选是实现海洋目标探测与监测的关键环节。传统的目标分选方法存在效率低下、误报率高等问题,因此需要引入先进的拖曳线列阵

基于拖曳线列阵的深海被动探测研究进展.pptx
基于拖曳线列阵的深海被动探测研究进展目录添加目录项标题研究背景和意义深海探测的重要性拖曳线列阵被动探测技术的提出研究目的和意义拖曳线列阵被动探测技术原理拖曳线列阵被动探测技术的基本原理拖曳线列阵被动探测技术的优势和局限性技术关键点和难点拖曳线列阵被动探测技术研究现状国内外研究现状及发展趋势现有研究成果和存在的问题研究方法和实验设计拖曳线列阵被动探测技术实验结果分析实验结果概述实验结果分析和解释结果与前人研究的对比和分析实验结果的应用前景和潜在影响拖曳线列阵被动探测技术未来研究方向未来研究方向的确定和选择依
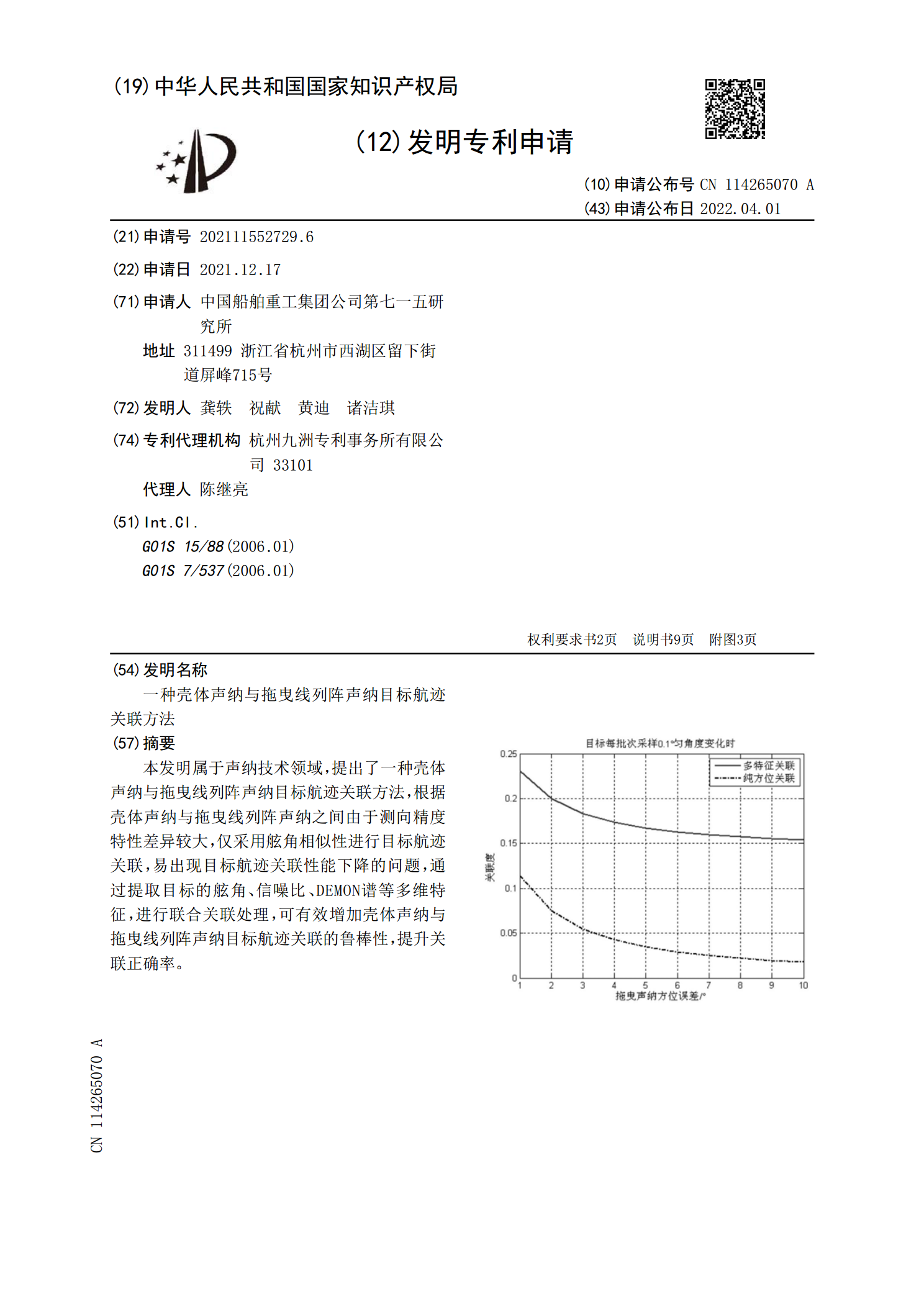
一种壳体声纳与拖曳线列阵声纳目标航迹关联方法.pdf
本发明属于声纳技术领域,提出了一种壳体声纳与拖曳线列阵声纳目标航迹关联方法,根据壳体声纳与拖曳线列阵声纳之间由于测向精度特性差异较大,仅采用舷角相似性进行目标航迹关联,易出现目标航迹关联性能下降的问题,通过提取目标的舷角、信噪比、DEMON谱等多维特征,进行联合关联处理,可有效增加壳体声纳与拖曳线列阵声纳目标航迹关联的鲁棒性,提升关联正确率。