
基于多传感器的AGV定位误差校正方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多传感器的AGV定位误差校正方法研究.docx
基于多传感器的AGV定位误差校正方法研究基于多传感器的AGV定位误差校正方法研究摘要:自动引导车(AGV)在物流、制造业等领域发挥着重要作用。AGV的定位精度对其导航和工作效率具有关键影响。然而,由于环境复杂性和传感器噪声等因素,AGV的定位误差难以完全避免。本文提出一种基于多传感器融合的AGV定位误差校正方法,以提高AGV的定位精度和稳定性。该方法通过传感器融合和误差补偿来校正AGV的定位误差,并利用卡尔曼滤波算法进行数据融合和估计。关键词:AGV、定位误差、多传感器融合、数据融合、卡尔曼滤波算法1.引

多传感器AGV机器人定位与导航方法研究.docx
多传感器AGV机器人定位与导航方法研究多传感器AGV机器人定位与导航方法研究摘要:随着自动化技术的不断发展,自动引导车(AGV)机器人在物流领域得到广泛应用。AGV机器人的定位和导航是其关键技术之一。传统的AGV机器人定位与导航方法依赖于单一传感器如激光传感器或摄像头,容易受到环境变化的影响。为了提高机器人的定位和导航精度,提高其适应性和可靠性,多传感器融合技术逐渐成为研究的热点。本文首先介绍了AGV机器人的背景和应用场景。然后,分析了传统单传感器定位和导航方法的局限性,并针对这些问题提出了多传感器融合的
一种多传感器的AGV定位方法.pdf
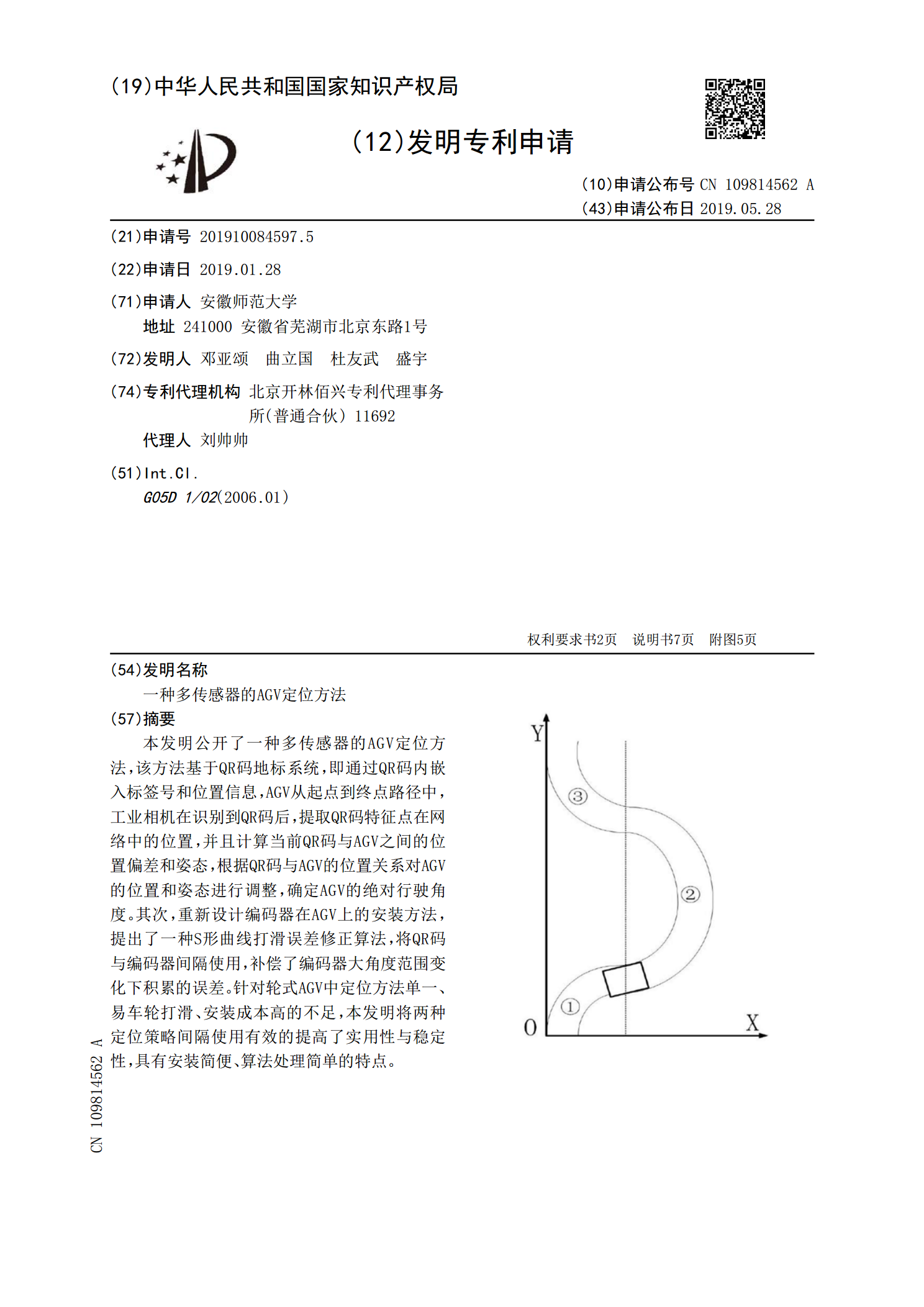
本发明公开了一种多传感器的AGV定位方法,该方法基于QR码地标系统,即通过QR码内嵌入标签号和位置信息,AGV从起点到终点路径中,工业相机在识别到QR码后,提取QR码特征点在网络中的位置,并且计算当前QR码与AGV之间的位置偏差和姿态,根据QR码与AGV的位置关系对AGV的位置和姿态进行调整,确定AGV的绝对行驶角度。其次,重新设计编码器在AGV上的安装方法,提出了一种S形曲线打滑误差修正算法,将QR码与编码器间隔使用,补偿了编码器大角度范围变化下积累的误差。针对轮式AGV中定位方法单一、易车轮打滑、安装

多传感器AGV机器人定位与导航方法研究的开题报告.docx
多传感器AGV机器人定位与导航方法研究的开题报告一、研究背景与意义随着现代制造业的发展,自动化生产技术的需求越来越高。AGV(AutomatedGuidedVehicle)自动导航小车因具有自动化控制、运行稳定、适应性强等特点,在工业生产线中得到广泛应用。AGV机器人的使用可以使得生产过程更高效、更稳定,还可以减少劳动力的使用,因此具有相当的经济和社会意义。AGV机器人在自动化制造生产中有着广泛的应用,其中定位与导航技术是实现自动化控制的核心之一。目前,常用的AGV机器人定位与导航技术主要包括激光导航、视

多传感器AGV机器人定位与导航方法研究的任务书.docx
多传感器AGV机器人定位与导航方法研究的任务书任务书:多传感器AGV机器人定位与导航方法研究一、研究背景随着自动化技术的发展,AGV(AutomaticGuidedVehicle)机器人的应用已经越来越广泛,成为自动化生产线、物流仓储等领域中不可或缺的一部分。AGV机器人的主要任务是在自动化的生产线、物流仓储场所中自主的完成物料的搬运、传递和堆放等任务,大大提高了生产效率和减少了人力成本。在AGV机器人的实际应用中,定位和导航是关键的技术之一。因为在AGV机器人的工作中,机器人需要在设定的路径上准确运行、