
基于MBTLAB的平面连杆机构的运动学分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于MBTLAB的平面连杆机构的运动学分析.docx
基于MBTLAB的平面连杆机构的运动学分析摘要本文基于MBTLAB,对平面连杆机构的运动学分析进行了探讨。首先,对平面连杆机构的基本概念进行了介绍;其次,介绍了MBTLAB的基本使用方法和功能;然后,利用MBTLAB对平面连杆机构进行了建模和仿真,得出了该连杆机构的运动学特性;最后,对实验结果进行了分析和讨论,总结了平面连杆机构的运动学分析所需要的关键点。关键词:MBTLAB、平面连杆机构、运动学分析、建模、仿真一、引言连杆机构是机械工程领域中的一个基本组成部分,其中平面连杆机构作为其中的重要一类,广泛应

基于MATLAB的平面四连杆机构运动学分析.docx
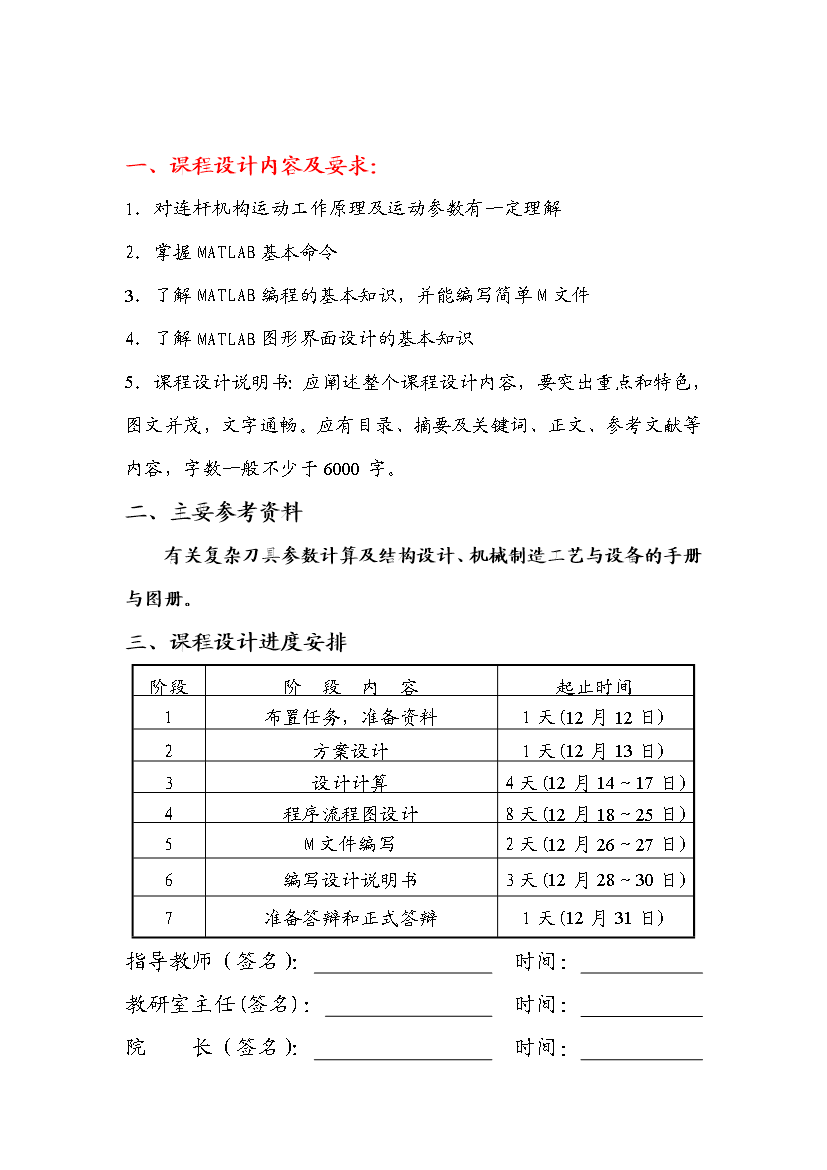
一、课程设计内容及要求:1.对连杆机构运动工作原理及运动参数有一定理解2.掌握MATLAB基本命令3.了解MATLAB编程的基本知识,并能编写简单M文件4.了解MATLAB图形界面设计的基本知识5.课程设计说明书:应阐述整个课程设计内容,要突出重点和特色,图文并茂,文字通畅。应有目录、摘要及关键词、正文、参考文献等内容,字数一般不少于6000字。二、主要参考资料有关复杂刀具参数计算及结构设计、机械制造工艺与设备的手册与图册。三、课程设计进度安排阶段阶段内容起止时间1布置任务,准备资料1天(12月12日)2
基于MATLAB的平面四连杆机构运动学分析.doc
一、课程设计内容及要求:1.对连杆机构运动工作原理及运动参数有一定理解2.掌握MATLAB基本命令3.了解MATLAB编程的基本知识并能编写简单M文件4.了解MATLAB图形界面设计的基本知识5.课程设计说明书:应阐述整个课程设计内容要突出重点和特色图文并茂文字通畅。应有目录、摘要及关键词、正文、参考文献等内容字数一般不少于6000字。二、主要参考资料有关复杂刀具参数计算及结构设计、机械制造工艺与设备的手册与图册。三、课程设计进度安排阶段阶段内容起止时间1布置任务准备资料1天(12月12日)2
基于MATLAB的平面四连杆机构运动学分析.doc
一、课程设计内容及要求:1.对连杆机构运动工作原理及运动参数有一定理解2.掌握MATLAB基本命令3.了解MATLAB编程的基本知识并能编写简单M文件4.了解MATLAB图形界面设计的基本知识5.课程设计说明书:应阐述整个课程设计内容要突出重点和特色图文并茂文字通畅。应有目录、摘要及关键词、正文、参考文献等内容字数一般不少于6000字。二、主要参考资料有关复杂刀具参数计算及结构设计、机械制造工艺与设备的手册与图册。三、课程设计进度安排阶段阶段内容起止时间1布置任务准备资料1天(12月12日)2
基于MATLAB的平面四连杆机构运动学分析.doc
一、课程设计内容及要求:1.对连杆机构运动工作原理及运动参数有一定理解2.掌握MATLAB基本命令3.了解MATLAB编程的基本知识并能编写简单M文件4.了解MATLAB图形界面设计的基本知识5.课程设计说明书:应阐述整个课程设计内容要突出重点和特色图文并茂文字通畅。应有目录、摘要及关键词、正文、参考文献等内容字数一般不少于6000字。二、主要参考资料有关复杂刀具参数计算及结构设计、机械制造工艺与设备的手册与图册。三、课程设计进度安排阶段阶段内容起止时间1布置任务准备资料1天(12月12日)2