
动态环境下基于动态区域剔除的双目视觉SLAM算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

动态环境下基于动态区域剔除的双目视觉SLAM算法.docx
动态环境下基于动态区域剔除的双目视觉SLAM算法标题:动态环境下基于动态区域剔除的双目视觉SLAM算法摘要:双目视觉SLAM(SimultaneousLocalizationandMapping)是一种基于视觉信息进行实时定位和地图构建的方法。然而,在动态环境下,传统的双目视觉SLAM算法容易受到动态物体的干扰,导致定位和地图构建的准确性下降。为了解决这一问题,本文提出了一种基于动态区域剔除的双目视觉SLAM算法。该算法通过对动态区域进行检测和剔除,有效地提高了双目视觉SLAM在动态环境下的稳定性和精度。

基于动态区域剔除与稠密地图构建的视觉SLAM算法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于动态区域剔除与稠密地图构建的视觉SLAM算法目录一、内容概述................................................21.1背景与意义...........................................21.2国内外研究现状.......................................31.3主要内容与结构...................................

动态环境下的语义视觉SLAM算法研究.docx
动态环境下的语义视觉SLAM算法研究摘要:语义视觉SLAM算法是一种结合了语义理解与传统视觉SLAM算法的新型算法,可以为机器人在复杂动态环境下高效、精确地完成位置感知和路径规划。本文首先介绍了视觉SLAM算法和语义理解的基本概念,然后阐述了动态环境对SLAM算法带来的挑战和需要解决的问题。随后,本文重点讲解了语义视觉SLAM算法的整体架构,包括语义感知、传统视觉SLAM和语义约束融合的过程。最后,本文对语义视觉SLAM算法的研究和未来发展进行了展望,包括更多通用物体识别算法的加入,以及结合深度学习等技术

基于语义信息与动态特征点剔除的SLAM算法.docx
基于语义信息与动态特征点剔除的SLAM算法基于语义信息与动态特征点剔除的SLAM算法摘要:随着无人驾驶和增强现实等领域的快速发展,同时也推动着同步定位与地图构建(SLAM)技术的发展。传统的SLAM算法主要基于几何特征点来实现定位和地图构建,但是在复杂的环境中,由于几何特征的变化、遮挡等原因,传统算法的性能会受到限制。为了解决这个问题,本文提出了一种基于语义信息与动态特征点剔除的SLAM算法。关键词:同步定位与地图构建(SLAM)、语义信息、动态特征点1.引言同步定位与地图构建(SLAM)是指在未知的环境
一种基于语义分割的动态环境双目视觉SLAM方法.pdf
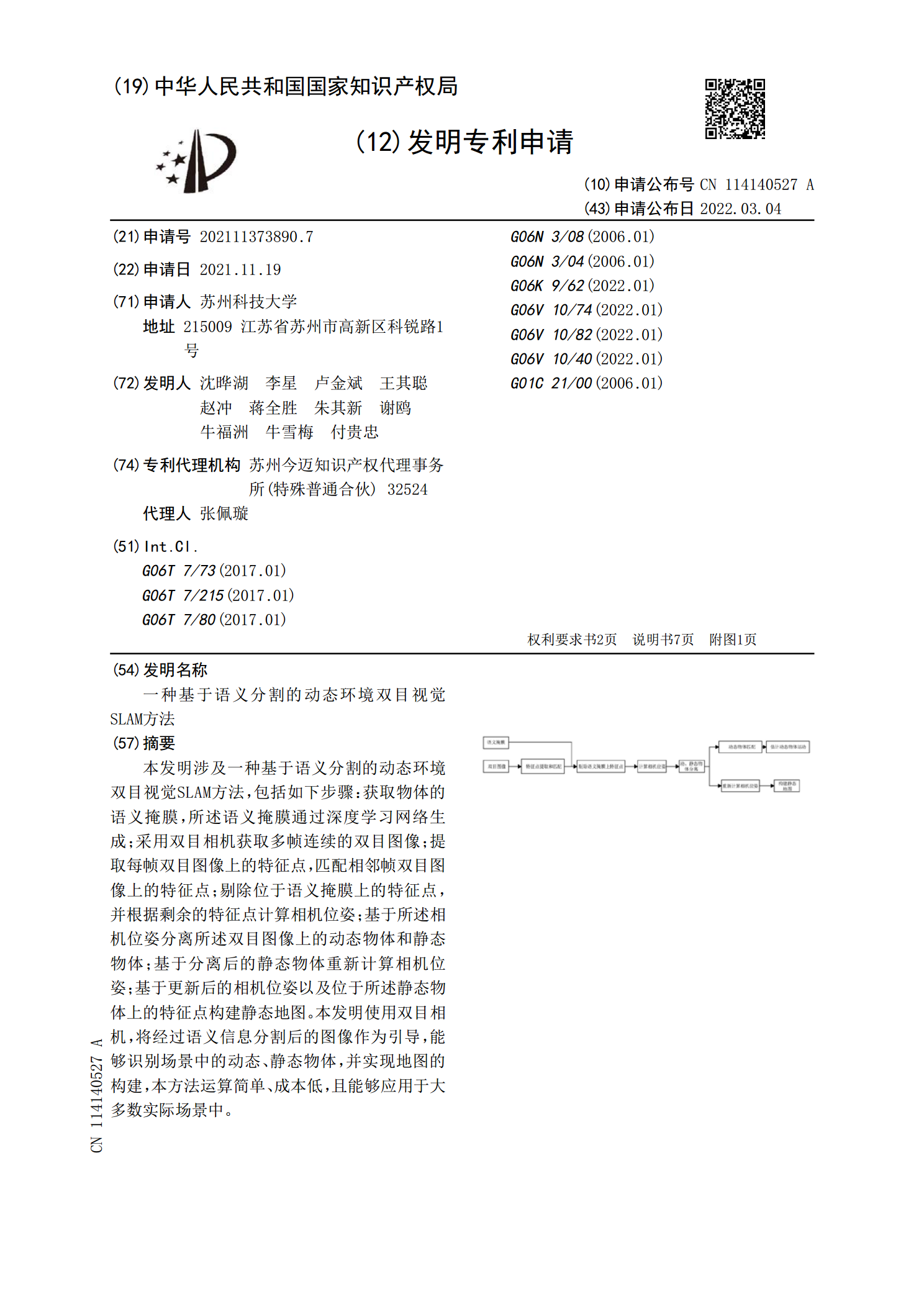
本发明涉及一种基于语义分割的动态环境双目视觉SLAM方法,包括如下步骤:获取物体的语义掩膜,所述语义掩膜通过深度学习网络生成;采用双目相机获取多帧连续的双目图像;提取每帧双目图像上的特征点,匹配相邻帧双目图像上的特征点;剔除位于语义掩膜上的特征点,并根据剩余的特征点计算相机位姿;基于所述相机位姿分离所述双目图像上的动态物体和静态物体;基于分离后的静态物体重新计算相机位姿;基于更新后的相机位姿以及位于所述静态物体上的特征点构建静态地图。本发明使用双目相机,将经过语义信息分割后的图像作为引导,能够识别场景中的