
一种针对临近空间滑跃目标的轨迹跟踪方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种针对临近空间滑跃目标的轨迹跟踪方法.docx
一种针对临近空间滑跃目标的轨迹跟踪方法Title:TrajectoryTrackingMethodforNear-SpaceGlideVehiclesAbstract:Near-spaceglidevehicleshavebecomeanareaofsignificantinterestduetotheirpotentialforlong-durationflightsandvariousapplications.Efficientlytrackingthetrajectoryofsuchvehicles

一种针对临近空间滑跃目标的轨迹跟踪方法.pptx
汇报人:目录PARTONE目标描述跟踪需求方法原理关键技术PARTTWO目标运动模型滑跃过程模型模型参数估计模型验证与修正PARTTHREE初始轨迹设计轨迹调整策略优化算法选择优化结果评估PARTFOUR控制算法原理控制器设计算法实现与验证性能分析与比较PARTFIVE系统架构与组成测试平台搭建测试方案与过程测试结果分析PARTSIX方法优势分析方法局限性分析方法改进方向THANKYOU

临近空间无人飞行器再入轨迹快速优化及跟踪.docx
临近空间无人飞行器再入轨迹快速优化及跟踪近年来,随着临近空间无人飞行器技术的不断发展,它们在火箭、卫星等载体中的应用越来越广泛。同时,为了保证其再入轨迹的安全性和精确性,快速优化和跟踪无人飞行器的再入轨迹成为设计和研究的重点。本文旨在介绍临近空间无人飞行器再入轨迹快速优化及跟踪的理论和实践,探讨其适用性和应用前景。首先,我们需要了解再入轨迹的意义及特征。再入轨迹是指无人飞行器从轨道飞回地球并着陆的路径。其特征包括起始位置、方向速度、高度、倾斜角等。为了确定再入轨迹,常用的方法有直接数学建模及优化方法。直接
一种基于滑模神经网络的智能车轨迹跟踪控制方法.pdf
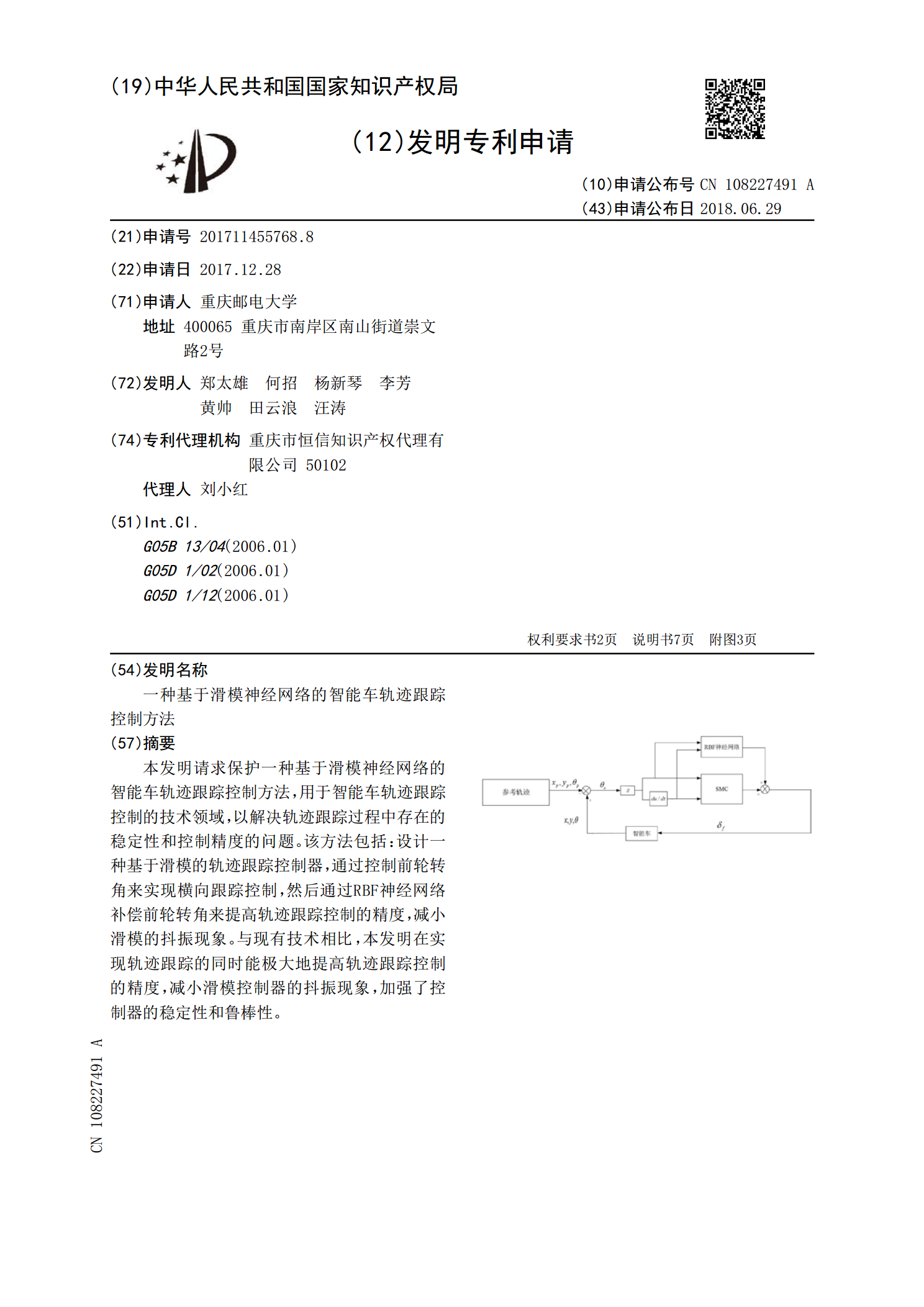
本发明请求保护一种基于滑模神经网络的智能车轨迹跟踪控制方法,用于智能车轨迹跟踪控制的技术领域,以解决轨迹跟踪过程中存在的稳定性和控制精度的问题。该方法包括:设计一种基于滑模的轨迹跟踪控制器,通过控制前轮转角来实现横向跟踪控制,然后通过RBF神经网络补偿前轮转角来提高轨迹跟踪控制的精度,减小滑模的抖振现象。与现有技术相比,本发明在实现轨迹跟踪的同时能极大地提高轨迹跟踪控制的精度,减小滑模控制器的抖振现象,加强了控制器的稳定性和鲁棒性。

一种针对圆形目标的分块检测尺度自适应跟踪方法.pdf
本发明公开了一种针对圆形目标的分块检测尺度自适应跟踪方法,分为两个阶段:利用分块检测判断目标遮挡情况以及分块进行基于特征点提取与目标边缘拟合的尺度自适应。根据目标预测位置框获取框内图像,将框内图像分为9个子块,计算框内图像与各子块的HOG特征与参照组特征的相似度,根据相似度判断跟踪失败情况与目标遮挡情况。对未被遮挡子块利用Sobel算子获取边缘梯度特征,并设计三级筛选方法筛选出有效特征点,将有效特征点进行目标边缘轮廓拟合,得到目标参考搜索框,根据目标参考搜索框与KCF模型搜索框尺度比例,对KCF模型进行训