
一种基于多维时空融合的车路协同系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于多维时空融合的车路协同系统.docx
一种基于多维时空融合的车路协同系统基于多维时空融合的车路协同系统摘要:随着智能交通系统的发展,车路协同系统作为一种新型的交通管理方式得到了广泛关注。传统的车路协同系统主要基于单一维度的信息,无法高效地处理复杂多变的交通情况。本文提出了一种基于多维时空融合的车路协同系统,通过综合多维度数据和时空信息,实现了更精确、高效的交通管理。该系统能够实时监测交通状况,提供准确的交通预测和决策支持,为交通参与者提供更安全、便捷的出行服务。关键词:车路协同系统;多维时空融合;智能交通系统;交通管理1.引言随着城市化进程的
一种基于车路协同的超视距融合感知系统.pdf
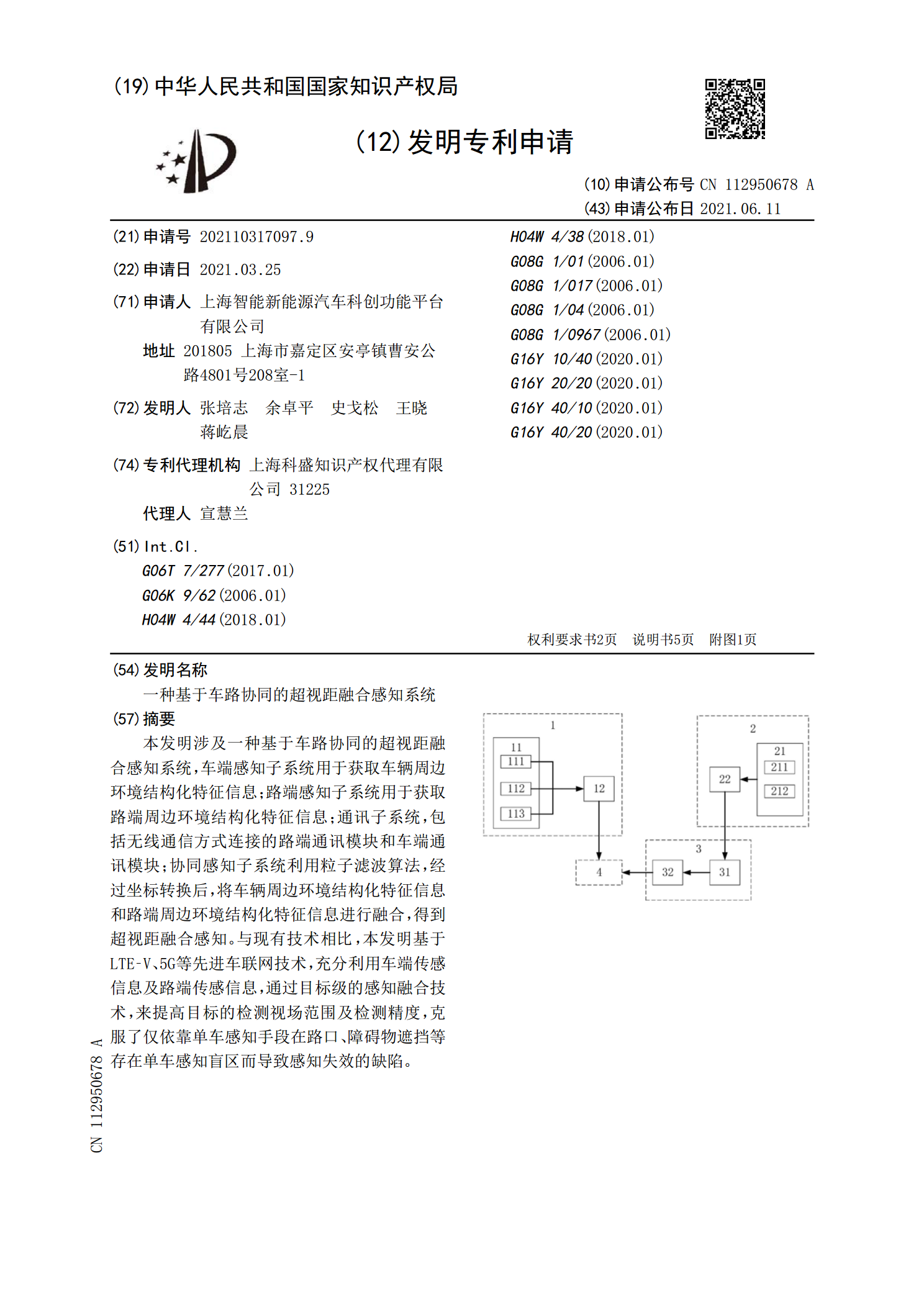
本发明涉及一种基于车路协同的超视距融合感知系统,车端感知子系统用于获取车辆周边环境结构化特征信息;路端感知子系统用于获取路端周边环境结构化特征信息;通讯子系统,包括无线通信方式连接的路端通讯模块和车端通讯模块;协同感知子系统利用粒子滤波算法,经过坐标转换后,将车辆周边环境结构化特征信息和路端周边环境结构化特征信息进行融合,得到超视距融合感知。与现有技术相比,本发明基于LTE‑V、5G等先进车联网技术,充分利用车端传感信息及路端传感信息,通过目标级的感知融合技术,来提高目标的检测视场范围及检测精度,克服了仅
一种基于车路协同的路侧感知融合系统及优化方法.pdf
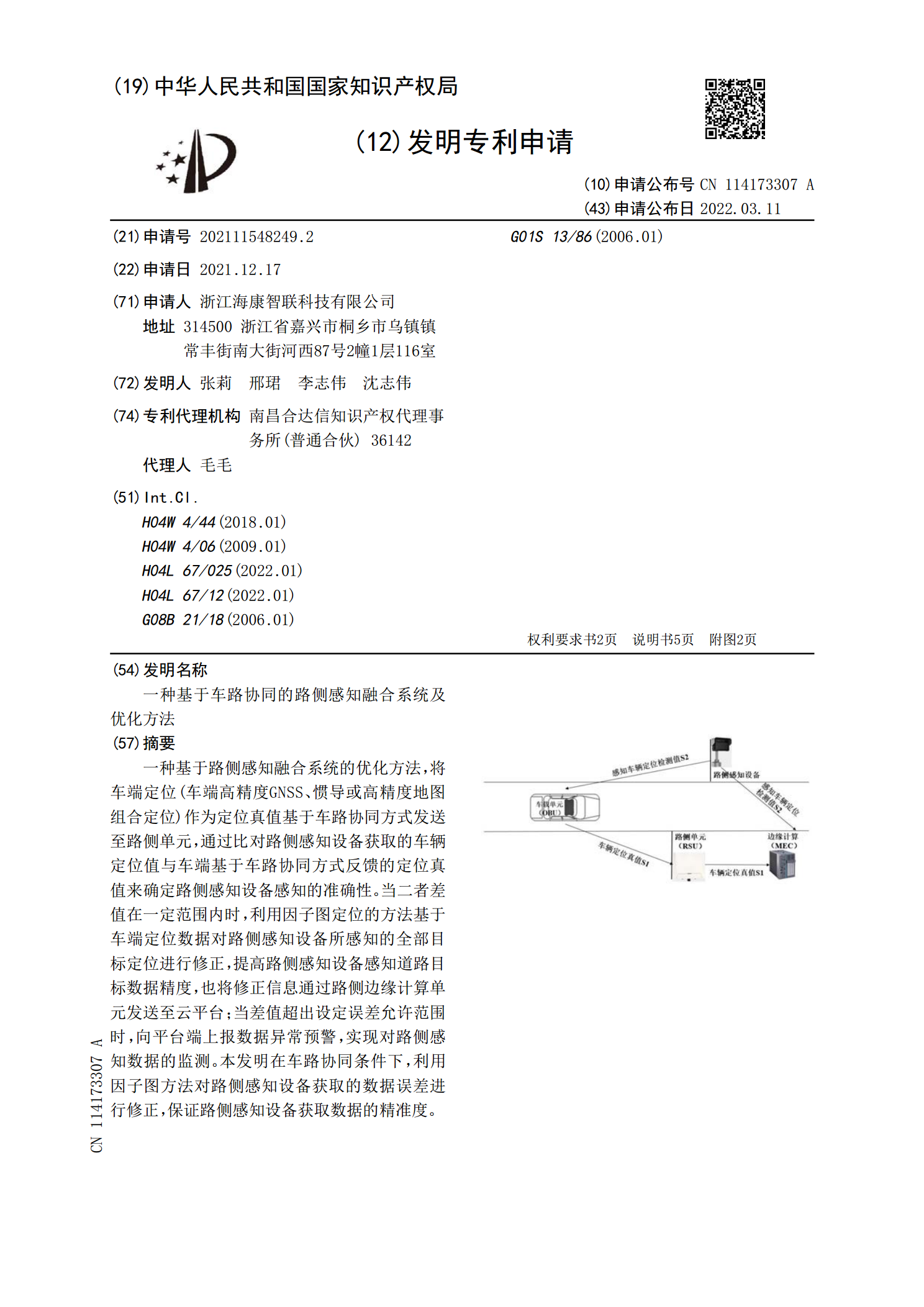
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监

一种基于车联网的车路协同防碰撞系统.pdf
本发明针对现有技术中存在的技术问题,提供一种基于车联网的车路协同防碰撞系统,其包括:视频传感器,进行障碍物检测及智能感知车道检测处理,实时视频开窗对车辆本身进行监控;盲区检测系统,包括毫米波雷达、超声波雷达和激光雷达,用于检测盲区状态;所述视频传感器、雷达传感器、定位模块、疲劳检测模块、显示处理模块、预警处理模块分别连接有传输模块,所述传输模块分别连接控制处理模块,所述控制处理模块连接有网络传输模块,所述网络传输模块连接有服务平台。判断障碍物靠近车辆时提醒驾驶人员注意,在气候条件不好的情况下,需要结合毫米
基于车路协同技术的公交精准数据融合中心系统及方法.pdf
本发明提供一种基于车路协同技术的公交精准数据融合中心系统,包括:路侧监测模块,用于基于预设路侧基础设施对目标公交的运行路面以及运行路线进行第一监测;车辆监测模块,用于对对应目标公交的当前运行情况进行第二监测以及对对应运行路线上的剩余车辆进行第三监测;数据融合模块,用于基于车路协同技术,将第一监测结果、第二监测结果、第三监测结果以及最新路标固有信息进行融合处理,预测对所述目标公交的管理服务。通过从多个维度获取数据,并对数据进行融合处理,进而实现对数据的精准处理,提高对公交的精准管理。