
ToF深度相机三维系统误差补偿方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

ToF深度相机三维系统误差补偿方法研究.docx
ToF深度相机三维系统误差补偿方法研究摘要:本文研究了ToF深度相机三维系统误差补偿方法。首先介绍了ToF深度相机的原理和工作方式,并指出了其存在的系统误差问题。然后详细讨论了误差来源和影响,包括光学非均匀性、噪声和多路径干扰等。接着,根据误差来源提出了一系列的补偿方法,包括光学校正、噪声滤波和多路径干扰抑制等。对每种方法进行了详细的原理和实验分析,并对比了它们的优缺点。最后,总结了研究结果,并针对未来的研究方向提出了展望。关键词:ToF深度相机,系统误差,误差来源,补偿方法,光学校正,噪声滤波,多路径干

TOF相机实时高精度深度误差补偿方法.docx
TOF相机实时高精度深度误差补偿方法一、绪论TOF相机技术是近年来被广泛研究和应用的一种成像技术,能够实现快速获取三维目标物体的深度信息,适用于室内和室外的环境。TOF相机由发光模块、接收模块、计算单元和控制单元四个主体部分组成。发光模块往目标物体发射一定频率的脉冲信号,接收模块接收返回的光脉冲信号,计算单元计算出光脉冲信号的时差,进而推算出目标物体的深度信息,实现三维成像。TOF相机具有很多优点,例如成像速度快、成像精度高、有效范围广等。但是每种技术都有自己的局限性,TOF相机也不例外。相机测量的深度信

基于脉冲型ToF深度相机的材质分类方法研究.docx
基于脉冲型ToF深度相机的材质分类方法研究基于脉冲型ToF深度相机的材质分类方法研究摘要:材质分类是计算机视觉领域的重要任务之一,具有广泛的应用前景。而脉冲型ToF深度相机是一种新兴的三维成像技术,可以通过测量物体的光时间飞行来获得物体的深度信息,为材质分类任务提供了新的可能性。本文针对脉冲型ToF深度相机在材质分类任务中的应用进行了研究。首先,介绍了脉冲型ToF深度相机的原理和特点。然后,探讨了脉冲型ToF深度相机在材质分类任务中的优势和挑战。接下来,提出了一种基于脉冲型ToF深度相机的材质分类方法,并
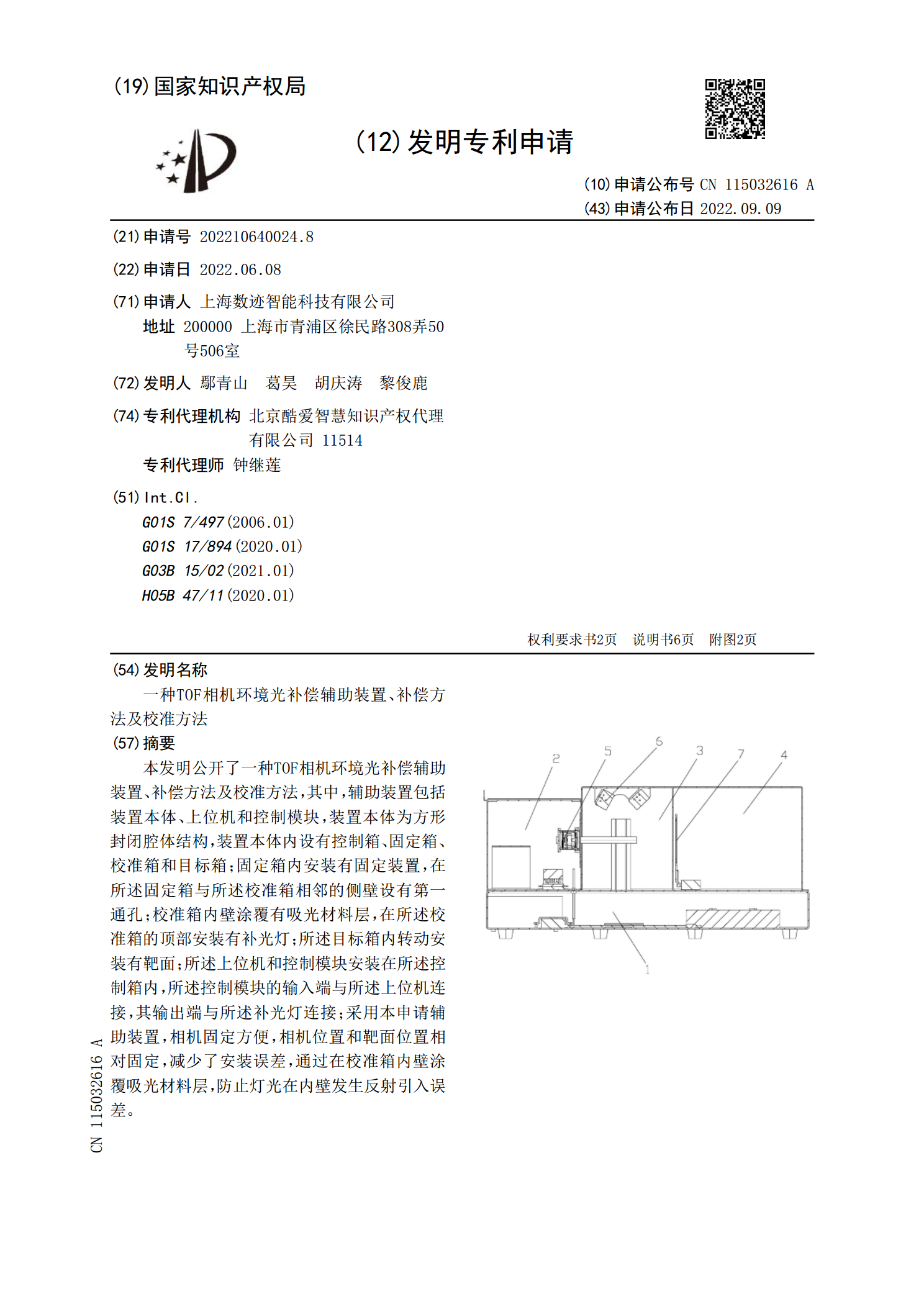
一种TOF相机环境光补偿辅助装置、补偿方法及校准方法.pdf
本发明公开了一种TOF相机环境光补偿辅助装置、补偿方法及校准方法,其中,辅助装置包括装置本体、上位机和控制模块,装置本体为方形封闭腔体结构,装置本体内设有控制箱、固定箱、校准箱和目标箱;固定箱内安装有固定装置,在所述固定箱与所述校准箱相邻的侧壁设有第一通孔;校准箱内壁涂覆有吸光材料层,在所述校准箱的顶部安装有补光灯;所述目标箱内转动安装有靶面;所述上位机和控制模块安装在所述控制箱内,所述控制模块的输入端与所述上位机连接,其输出端与所述补光灯连接;采用本申请辅助装置,相机固定方便,相机位置和靶面位置相对固定

TOF相机深度数据测量中的空间配准方法研究.docx
TOF相机深度数据测量中的空间配准方法研究标题:TOF相机深度数据测量中的空间配准方法研究摘要:TOF(TimeofFlight)相机是一种基于光学原理测量深度信息的设备,具有非接触、快速、高精度等优点,在工业、医疗、智能交通等领域得到广泛应用。然而,TOF相机的深度数据受到多种因素的影响,容易出现测量误差和深度图像不准确等问题。因此,本文研究了TOF相机深度数据测量中的空间配准方法,以提高深度图像的测量精度和准确性。关键词:TOF相机;深度数据;空间配准;测量精度;准确性1.引言TOF相机是一种新兴的深