
基于拓扑优化的上肢助力外骨骼机器人设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于拓扑优化的上肢助力外骨骼机器人设计.docx
基于拓扑优化的上肢助力外骨骼机器人设计基于拓扑优化的上肢助力外骨骼机器人设计摘要:近年来,随着人口老龄化的加剧和工业领域对人力资源的需求逐渐增加,上肢助力外骨骼机器人作为辅助人们完成各种工作任务的设备得到了广泛关注。然而,现有的外骨骼机器人设计普遍存在重量大、能耗高、动作笨拙等问题。为了解决这些问题,本文提出了一种基于拓扑优化的上肢助力外骨骼机器人设计方法。通过对外骨骼结构进行优化,减轻其重量和能耗的同时,提高了机器人的运动灵活性和人机协同性。实验结果表明,所设计的外骨骼机器人在助力功能、重量、能耗等方面

基于拓扑优化的上肢助力外骨骼机器人设计的开题报告.docx
基于拓扑优化的上肢助力外骨骼机器人设计的开题报告一、选题背景随着人口老龄化程度的加深,许多老年人由于动力学不足或者患有类似帕金森和脑卒中等运动障碍疾病,影响了他们的日常生活和行动自由。因此,设计和实现助力外骨骼机器人成为了刻不容缓的发展方向。外骨骼机器人通过向人体周围释放控制力,能够大大提升丧失肢体功能的人的生活和工作能力。外部作用力可以帮助那些丧失了手臂或手指灵活性的人重新获取生活独立性。设计一个能够为人们带来实际帮助和好处的助力外骨骼系统,是一件非常具有挑战性的任务。二、选题意义基于拓扑优化的上肢助力

上肢助力外骨骼机器人.pdf
本发明公开了一种上肢助力外骨骼机器人,包括伸缩模拟肌肉、液压动力机构、胸部支撑架、肩部支撑架和大臂连接套;伸缩模拟肌肉包括第一软管和多个液压缸,液压缸内设置有第一活塞、第一活塞杆、第二活塞和第二活塞杆,相邻液压缸的第一活塞杆和第二活塞杆连接,胸部支撑架固定在用户的胸部,肩部支撑架固定在用户的肩部,大臂连接套固定在用户的大臂上,伸缩模拟肌肉的两端的液压缸分别连接肩部支撑架和大臂连接套;本发明利用多个液压缸形成伸缩模拟肌肉,不但结构小质量轻,而且通过将伸缩模拟肌肉附着在大臂的不同位置可以助力大臂实现举臂、下垂
一种助力上肢外骨骼机器人.pdf
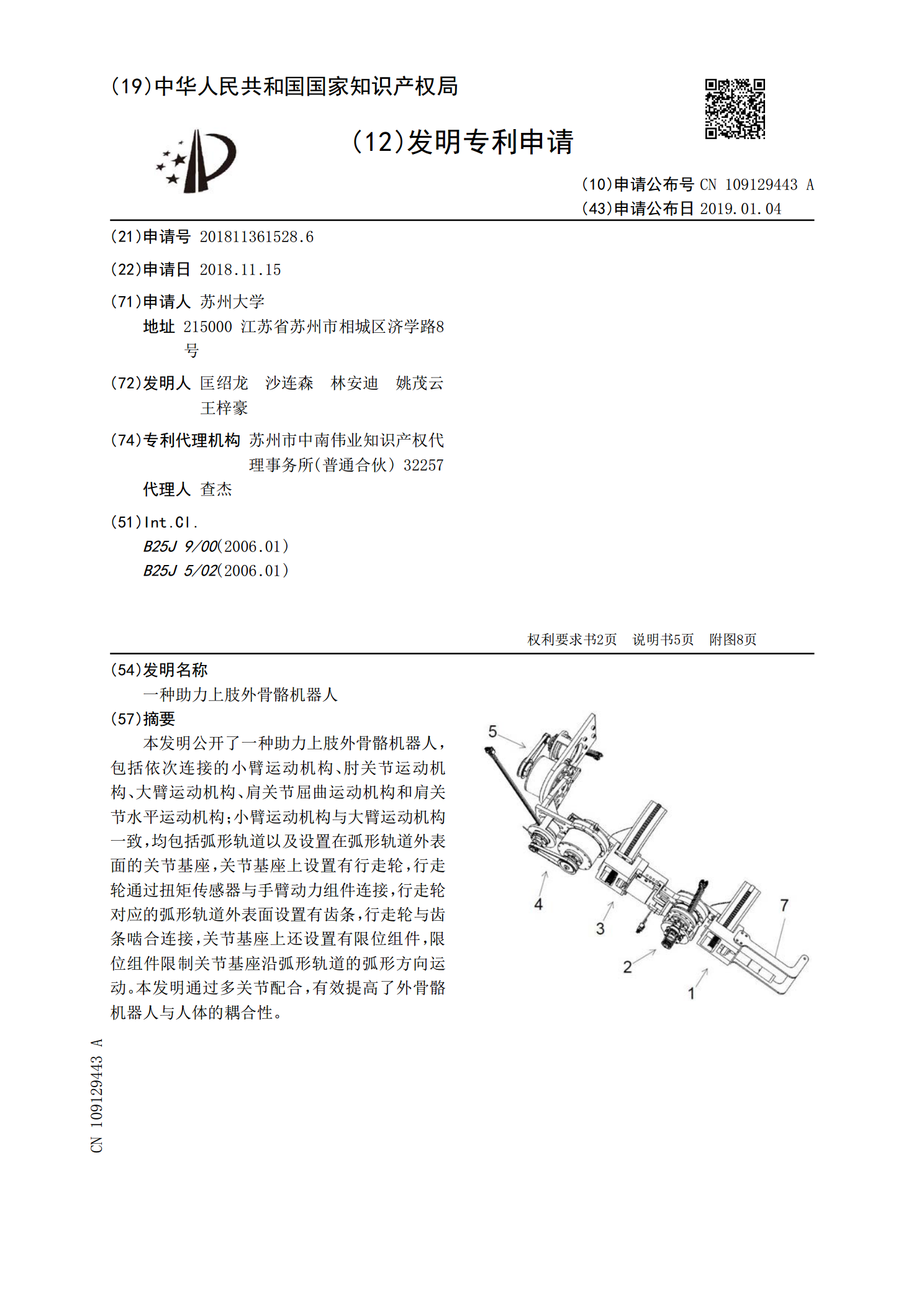
本发明公开了一种助力上肢外骨骼机器人,包括依次连接的小臂运动机构、肘关节运动机构、大臂运动机构、肩关节屈曲运动机构和肩关节水平运动机构;小臂运动机构与大臂运动机构一致,均包括弧形轨道以及设置在弧形轨道外表面的关节基座,关节基座上设置有行走轮,行走轮通过扭矩传感器与手臂动力组件连接,行走轮对应的弧形轨道外表面设置有齿条,行走轮与齿条啮合连接,关节基座上还设置有限位组件,限位组件限制关节基座沿弧形轨道的弧形方向运动。本发明通过多关节配合,有效提高了外骨骼机器人与人体的耦合性。

基于外骨骼的上肢康复机器人设计与研究.docx
基于外骨骼的上肢康复机器人设计与研究摘要随着科技和医疗技术的不断进步,智能康复机器人成为一种越来越被广泛关注的康复技术。本文基于外骨骼的上肢康复机器人,介绍了其设计和研究,探讨了其康复效果和未来发展趋势。该机器人可以帮助患者恢复上肢的运动能力,对肢体功能康复起到重要的作用,具有广阔的应用前景。关键字:外骨骼;上肢康复机器人;设计;研究AbstractWiththecontinuousprogressoftechnologyandmedicaltechnology,Intelligentrehabilita