
基于深度学习的分拣机器人目标智能定位仿真.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于深度学习的分拣机器人目标智能定位仿真.docx
基于深度学习的分拣机器人目标智能定位仿真基于深度学习的分拣机器人目标智能定位仿真摘要:随着电子商务的快速发展,物流行业也迎来了全新的机遇和挑战。分拣作为物流行业的重要环节之一,要求高效且准确的目标定位能力。然而,传统的分拣方法通常依赖于人工操作,效率低且容易出错。为了解决这个问题,本文提出了一种基于深度学习的分拣机器人目标智能定位仿真方法。通过仿真实验,验证了该方法的有效性和可行性。关键词:深度学习,分拣机器人,目标定位,仿真1.引言随着物流行业的快速发展,分拣作为物流流程的关键环节之一,对速度和准确性要
基于深度学习的煤矸石智能分拣系统.pdf
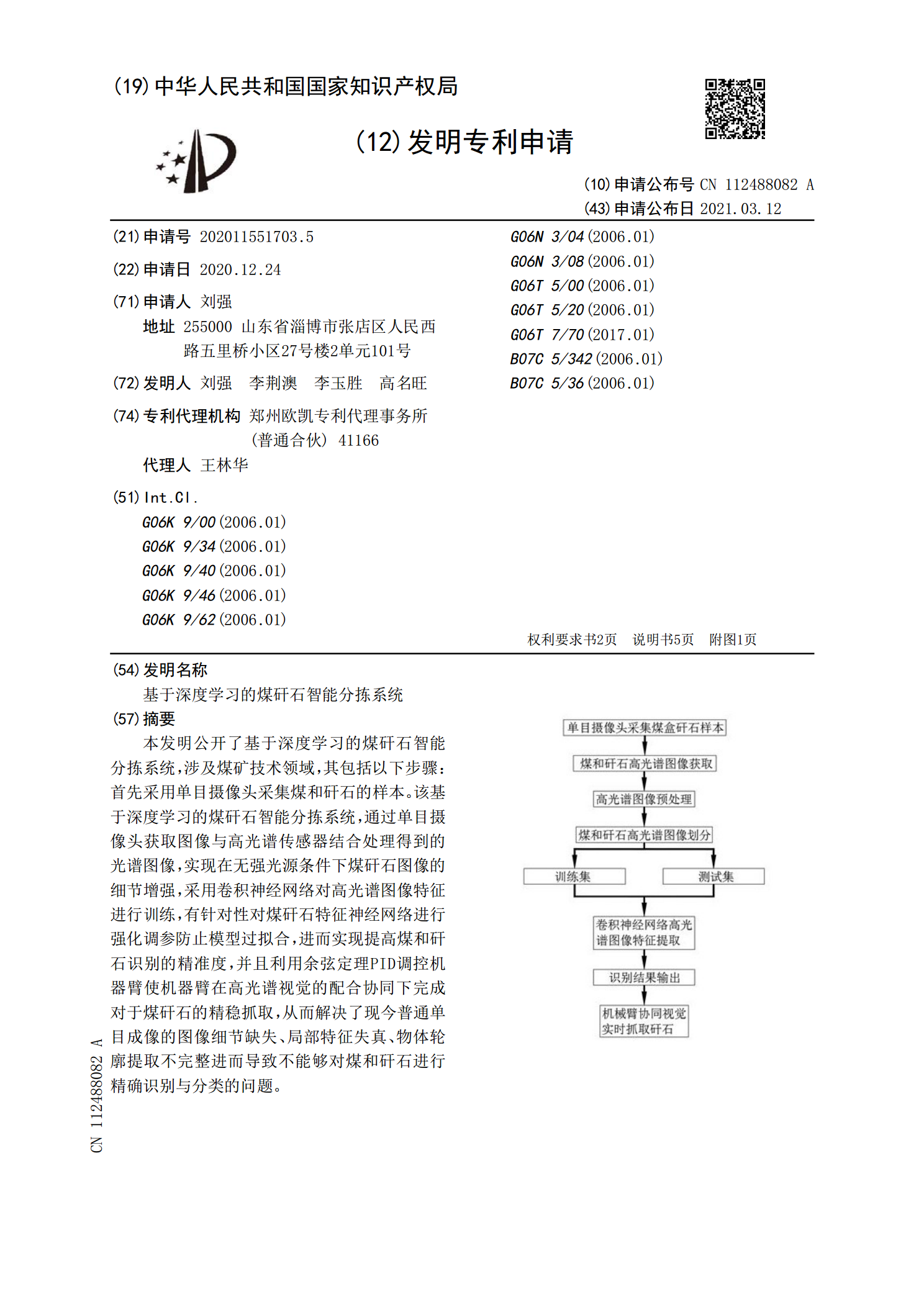
本发明公开了基于深度学习的煤矸石智能分拣系统,涉及煤矿技术领域,其包括以下步骤:首先采用单目摄像头采集煤和矸石的样本。该基于深度学习的煤矸石智能分拣系统,通过单目摄像头获取图像与高光谱传感器结合处理得到的光谱图像,实现在无强光源条件下煤矸石图像的细节增强,采用卷积神经网络对高光谱图像特征进行训练,有针对性对煤矸石特征神经网络进行强化调参防止模型过拟合,进而实现提高煤和矸石识别的精准度,并且利用余弦定理PID调控机器臂使机器臂在高光谱视觉的配合协同下完成对于煤矸石的精稳抓取,从而解决了现今普通单目成像的图像
基于MCU的智能分拣机器人.pptx
汇报人:CONTENTS添加章节标题MCU智能分拣机器人的概述MCU智能分拣机器人的定义MCU智能分拣机器人的工作原理MCU智能分拣机器人的应用场景MCU智能分拣机器人的硬件组成MCU控制模块传感器模块执行器模块电源模块MCU智能分拣机器人的软件设计MCU的编程语言和开发环境机器人的控制算法机器人的感知和识别算法机器人的路径规划和运动控制算法MCU智能分拣机器人的应用案例在物流行业中的应用在电商行业中的应用在医药行业中的应用在其他行业中的应用MCU智能分拣机器人的未来发展技术创新和发展趋势应用领域的拓展和

基于深度学习的移动机器人目标检测与定位研究.docx
基于深度学习的移动机器人目标检测与定位研究基于深度学习的移动机器人目标检测与定位研究摘要:随着社会的发展和技术的进步,移动机器人在多个领域中的应用越来越广泛。为了实现自主导航和执行任务,移动机器人需要具备目标检测与定位的能力。基于深度学习的方法已经被证明在目标检测和定位任务中取得了显著的成果。本文通过综述相关研究,总结了基于深度学习的移动机器人目标检测与定位的方法和技术,并对其可能的应用进行了讨论。1.引言移动机器人是一种能够在不同环境中自主导航和执行任务的机器人系统。为了实现其自主导航和执行任务的能力,

基于机器视觉的分拣机器人目标识别与定位的研究的中期报告.docx
基于机器视觉的分拣机器人目标识别与定位的研究的中期报告一、题目基于机器视觉的分拣机器人目标识别与定位的研究二、研究背景和意义随着自动化技术的发展,机器人在工业生产、物流分拣、家庭服务和医疗护理等领域得到了广泛的应用。分拣机器人作为自动化物流分拣领域的重要一员,目前已被广泛应用于快递、仓储、邮政等领域。然而,在实际应用中,分拣机器人需要面临大量物品混杂、不规则形状、不同大小和颜色等多种目标,如何进行快速、准确地目标识别和定位,是实现高效自动化分拣的关键之一。在这种背景下,本研究提出了基于机器视觉的分拣机器人