
基于Kinect的机器人抓取系统研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Kinect的机器人抓取系统研究.docx
基于Kinect的机器人抓取系统研究基于Kinect的机器人抓取系统研究摘要:近年来,机器人技术得到了广泛的研究和应用,并在工业、医疗、农业等领域展示出了巨大的潜力。机器人的抓取能力是其实现各种任务的关键因素之一。本文针对机器人抓取系统的研究,利用Kinect感应器来获取环境信息,并结合机器学习算法,实现机器人的抓取任务。通过实验验证,证明了基于Kinect的机器人抓取系统在物体识别和抓取能力方面的有效性。关键词:Kinect;机器人;抓取系统;机器学习;物体识别一、引言机器人的抓取技术是机器人实现各种任

基于Kinect的机械臂目标抓取.docx
基于Kinect的机械臂目标抓取基于Kinect的机械臂目标抓取摘要机械臂的目标抓取一直是机器人领域的重要研究方向之一。本文提出了一种基于Kinect的机械臂目标抓取方法。通过Kinect传感器获取目标物体的深度图像信息,结合计算机视觉算法进行目标识别和姿态估计,然后通过运动规划算法计算机械臂的运动轨迹并控制机械臂进行目标抓取。实验证明,该方法能够实现准确、稳定的目标抓取。关键词:机械臂,目标抓取,Kinect,深度图像,姿态估计1.研究背景机器人的目标抓取是机器人领域的重要研究方向之一。目标抓取是指机械

基于机器视觉的工业机器人抓取系统研究.docx
基于机器视觉的工业机器人抓取系统研究随着工业自动化技术的不断发展,工业机器人已经逐渐成为了现代工业的主流工具之一。工业机器人以其高效、准确、稳定等特点,为企业带来了巨大的经济效益。然而,要想实现工业机器人的自主化操作,关键技术之一便是视觉识别技术。工业机器人抓取系统是机器视觉技术应用于工业机器人领域的一个重要代表。工业机器人抓取系统使用视觉识别技术,实现对工件的自动识别和抓取。传统的机器人抓取系统需要通过编程方式进行操作,难以适应不同工件的应用。而基于机器视觉的工业机器人抓取系统则可以实现机器人对不同形状

基于PLC的果蔬机器人抓取控制系统研究.docx
基于PLC的果蔬机器人抓取控制系统研究基于PLC的果蔬机器人抓取控制系统研究摘要:随着科技的不断发展,机器人技术在农业领域的应用越来越广泛。本文以果蔬机器人的抓取控制系统为研究对象,探索了基于PLC的抓取控制系统的实现和优势。首先分析了果蔬机器人抓取系统的需求和问题,然后详细介绍了PLC技术的基本原理和应用范围。接着,设计了基于PLC的果蔬机器人抓取控制系统的硬件架构和软件设计,通过实验验证了系统的可行性和可靠性。最后,总结了本文的研究成果,并展望了未来的研究方向。关键词:果蔬机器人,抓取控制系统,PLC
基于Kinect的木制机器人.pdf
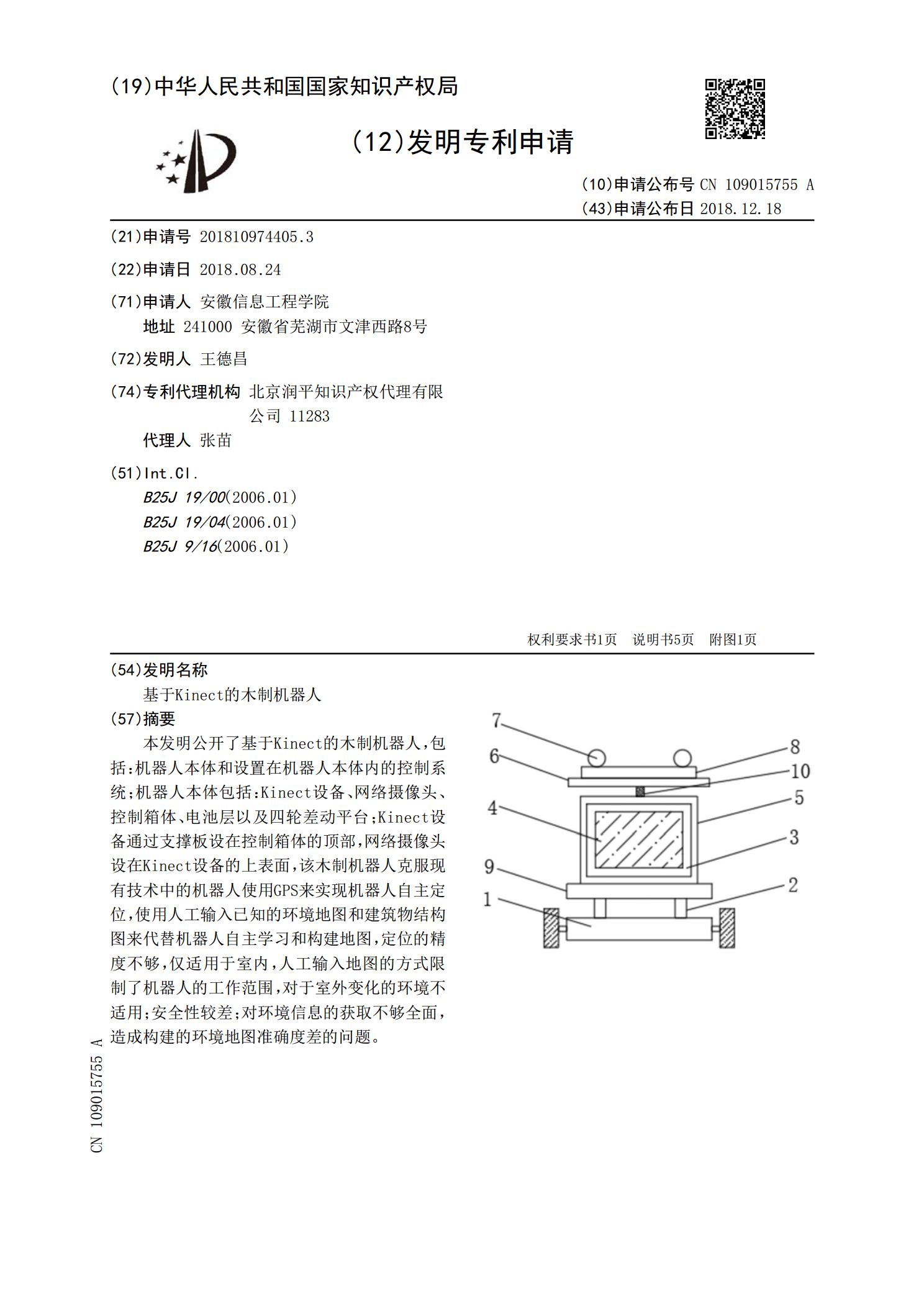
本发明公开了基于Kinect的木制机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,该木制机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用;安全性较差;对环境