
基于鲁棒无迹卡尔曼滤波的无线室内定位算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于鲁棒无迹卡尔曼滤波的无线室内定位算法.docx
基于鲁棒无迹卡尔曼滤波的无线室内定位算法基于鲁棒无迹卡尔曼滤波的无线室内定位算法摘要:室内定位是指在室内环境下,使用无线通信技术对移动设备进行定位。鲁棒无迹卡尔曼滤波算法是一种常用于室内定位的滤波算法。本文基于鲁棒无迹卡尔曼滤波算法,提出了一种无线室内定位算法,并通过实验验证了该算法的准确性和可靠性。关键词:室内定位、无线通信、鲁棒无迹卡尔曼滤波、移动设备引言随着无线通信技术的发展,室内定位在商业和日常生活中得到越来越广泛的应用。在室内环境中,GPS定位信号的精度受限,不能满足定位的要求。因此,研究和开发

基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现.docx
基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现基于无迹卡尔曼滤波(UnscentedKalmanFilter,UKF)的RSSI室内定位算法设计与实现摘要:随着无线传感技术的广泛应用,室内定位成为一个备受关注的问题。在室内环境中,利用接收到的信号强度指示(RSSI),可进行定位。但由于RSSI受到诸多因素的影响,如障碍物、信号衰减等,传统的RSSI室内定位算法往往存在精度较低的问题。本文基于无迹卡尔曼滤波(UKF)提出了一种新的室内定位算法,以提高定位精度。关键词:室内定位,RSSI,无迹卡

基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现的开题报告.docx
基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现的开题报告一、研究背景及意义室内定位已经成为当前无线通信研究中一个重要的热点问题,其主要原因是GPS定位在室内将受到建筑物、墙体、设施等多种因素的影响,常规的定位方式难以满足室内定位的需求。而基于接收信号强度指标(RSSI)的室内定位技术因为其操作简便、全天候使用、不需额外设备等特性已经被广泛应用。但是,由于室内环境的复杂性,RSSI信号的衰减和多路径效应使得收集RSSI数据并非易事。同时,室内定位的误差较大,影响其应用价值。因此,提高室内定位的

基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现的任务书.docx
基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现的任务书任务书:基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法设计与实现一、任务描述当前,人们生活、工作、娱乐等活动都离不开室内环境。因此,室内定位技术应运而生。室内定位技术能够帮助人们更好地了解空间信息,实现个性化服务,提高效率。本任务旨在通过研究和实现基于无迹卡尔曼滤波(UKF)的RSSI室内定位算法,实现对室内物体及其位置的准确定位。二、任务目标1.了解室内定位技术发展历史和现状。2.了解室内定位技术中无迹卡尔曼滤波(UKF)的原理及其
基于鲁棒无迹卡尔曼滤波的质心侧偏角估计方法及系统.pdf
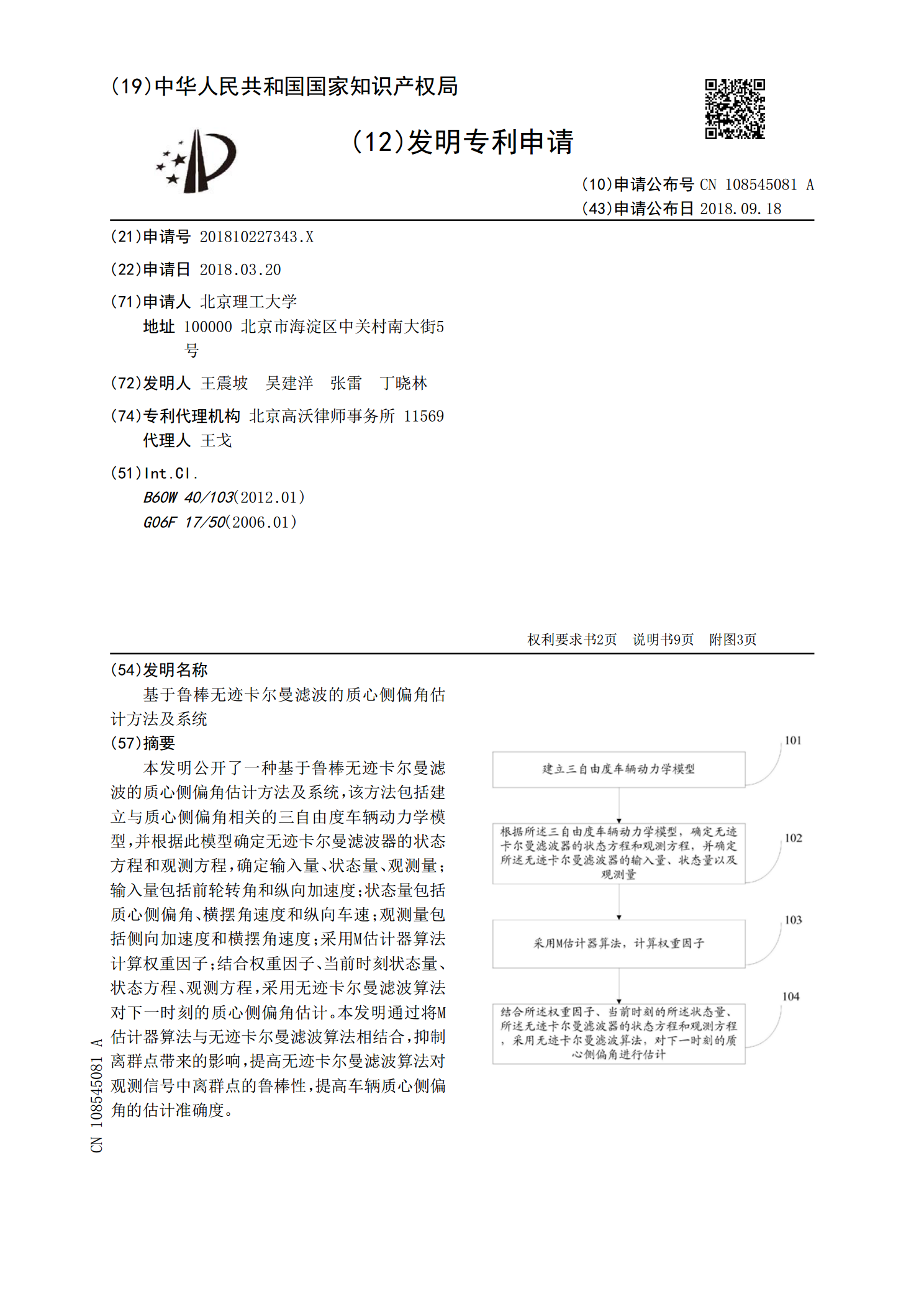
本发明公开了一种基于鲁棒无迹卡尔曼滤波的质心侧偏角估计方法及系统,该方法包括建立与质心侧偏角相关的三自由度车辆动力学模型,并根据此模型确定无迹卡尔曼滤波器的状态方程和观测方程,确定输入量、状态量、观测量;输入量包括前轮转角和纵向加速度;状态量包括质心侧偏角、横摆角速度和纵向车速;观测量包括侧向加速度和横摆角速度;采用M估计器算法计算权重因子;结合权重因子、当前时刻状态量、状态方程、观测方程,采用无迹卡尔曼滤波算法对下一时刻的质心侧偏角估计。本发明通过将M估计器算法与无迹卡尔曼滤波算法相结合,抑制离群点带来