
基于前视声纳的水下环境地图构建方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于前视声纳的水下环境地图构建方法研究.docx
基于前视声纳的水下环境地图构建方法研究基于前视声纳的水下环境地图构建方法研究摘要:水下环境地图构建一直是水下探测领域的研究热点之一。本文将重点研究基于前视声纳的水下环境地图构建方法。根据前视声纳的工作原理和应用场景的特点,本文提出了一种基于声纳数据融合和建图算法的水下环境地图构建方法,并进行了仿真实验和实际水下探测验证。实验结果表明,该方法能够有效地构建精确、实时的水下环境地图,具有较高的应用前景。关键词:前视声纳,水下环境地图,声纳数据融合,建图算法,实时性,精确性1.引言水下环境地图是指基于水下传感器

基于前视声纳的水下环境地图构建方法研究的任务书.docx
基于前视声纳的水下环境地图构建方法研究的任务书任务书任务名称:基于前视声纳的水下环境地图构建方法研究任务背景:水下环境是我们所处的地球上广阔的空间之一,水下环境浩瀚无垠,隐藏着无数神秘的生物和物质。为了更好地了解和利用水下资源,人们需要开展一系列的水下探测和勘测工作。其中一个重要的问题就是构建水下环境的地图,以便更好地了解水下环境的形态特征和内部结构。然而,由于水下环境光线照射弱,水体介质非常复杂,并且水下环境中存在大量的干扰和噪声源,传统的水下地图构建方法很难满足实际需求。因此,需要研究一种基于前视声纳
基于前视声纳的水下机器人避碰方法.pdf
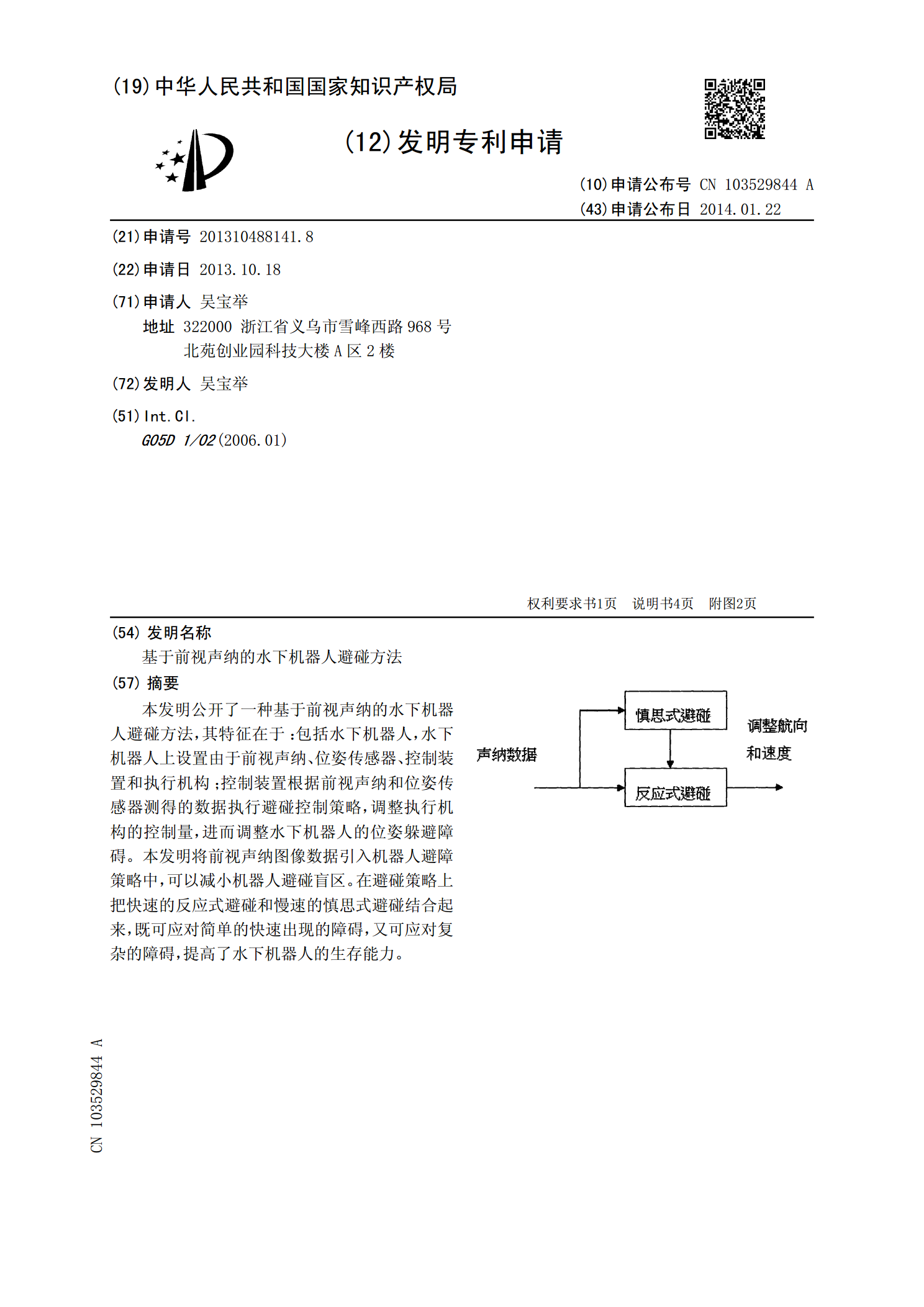
本发明公开了一种基于前视声纳的水下机器人避碰方法,其特征在于:包括水下机器人,水下机器人上设置由于前视声纳、位姿传感器、控制装置和执行机构;控制装置根据前视声纳和位姿传感器测得的数据执行避碰控制策略,调整执行机构的控制量,进而调整水下机器人的位姿躲避障碍。本发明将前视声纳图像数据引入机器人避障策略中,可以减小机器人避碰盲区。在避碰策略上把快速的反应式避碰和慢速的慎思式避碰结合起来,既可应对简单的快速出现的障碍,又可应对复杂的障碍,提高了水下机器人的生存能力。

基于深度学习的前视声纳水下目标跟踪技术.docx
基于深度学习的前视声纳水下目标跟踪技术基于深度学习的前视声纳水下目标跟踪技术摘要:在水下目标跟踪领域,由于水下环境的复杂性和目标的动态性,传统的水下目标跟踪方法往往难以取得良好的效果。近年来,深度学习技术的快速发展为水下目标跟踪领域带来了新的突破。本文针对水下目标跟踪问题,基于深度学习的前视声纳水下目标跟踪技术进行了研究,提出了一种基于深度学习和感知模块的目标跟踪框架,并对该框架进行了实验验证。实验结果表明,该方法相较于传统方法在水下目标跟踪效果上有显著的提升。1.引言水下目标跟踪是水下机器人、水下探测等

基于前视声纳的水下机器人目标自主跟踪研究.pptx
汇报人:CONTENTSPARTONEPARTTWO当前水下探测技术面临的挑战前视声纳在目标跟踪中的优势研究意义与应用前景PARTTHREE前视声纳技术概述水下机器人自主导航技术目标跟踪算法研究现状关键技术问题与难点PARTFOUR系统总体架构设计前视声纳系统硬件设计水下机器人控制系统设计目标跟踪算法实现PARTFIVE实验环境与条件实验结果展示结果分析与比较性能评估与优化PARTSIX研究成果总结创新点与贡献未来研究方向展望汇报人: