
一种长隧道内高速列车实时高精度定位方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种长隧道内高速列车实时高精度定位方法.docx
一种长隧道内高速列车实时高精度定位方法标题:一种基于多传感器融合的长隧道内高速列车实时高精度定位方法摘要:随着高速列车技术的飞速发展,长隧道内高精度定位对列车的安全性和运行效率起着重要作用。本论文提出了一种基于多传感器融合的长隧道内高速列车实时高精度定位方法。该方法通过融合雷达、惯性导航系统(INS)、全球卫星定位系统(GNSS)和激光测距仪等多种传感器数据,实现了对列车位置的连续、准确和实时的定位。关键词:高速列车、长隧道、实时定位、高精度、多传感器融合1.引言长隧道内高速列车的定位一直是工程技术面临的

基于SINSRFID的隧道列车高精度定位方法.docx
基于SINSRFID的隧道列车高精度定位方法基于SINSRFID的隧道列车高精度定位方法摘要:随着城市发展和人口增长,隧道交通成为现代交通系统的重要组成部分。对于隧道列车来说,精确的定位对于安全性和运行效率至关重要。本文提出了一种基于SINSRFID的隧道列车高精度定位方法,结合惯性导航系统(SINS)和射频识别技术(RFID),实现了车辆在隧道环境中的准确定位和导航。1.引言隧道交通是现代城市交通系统的重要组成部分,但由于隧道内部的限制和信号屏蔽问题,隧道内的列车定位一直是一个挑战。传统的定位方法如GP
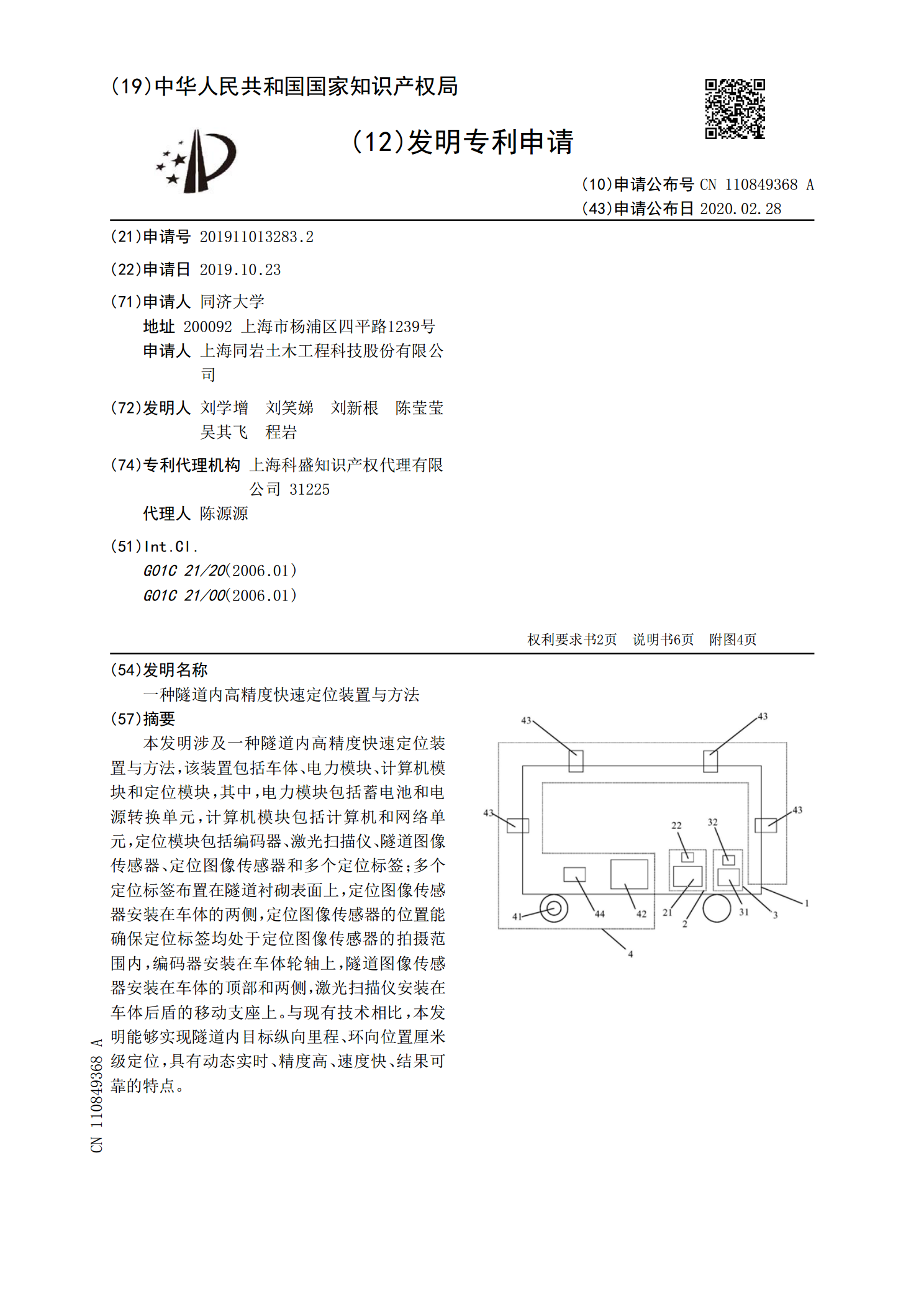
一种隧道内高精度快速定位装置与方法.pdf
本发明涉及一种隧道内高精度快速定位装置与方法,该装置包括车体、电力模块、计算机模块和定位模块,其中,电力模块包括蓄电池和电源转换单元,计算机模块包括计算机和网络单元,定位模块包括编码器、激光扫描仪、隧道图像传感器、定位图像传感器和多个定位标签;多个定位标签布置在隧道衬砌表面上,定位图像传感器安装在车体的两侧,定位图像传感器的位置能确保定位标签均处于定位图像传感器的拍摄范围内,编码器安装在车体轮轴上,隧道图像传感器安装在车体的顶部和两侧,激光扫描仪安装在车体后盾的移动支座上。与现有技术相比,本发明能够实现隧

长隧道环境下高速铁路列车高精度定位研究.docx
长隧道环境下高速铁路列车高精度定位研究在现代交通运输领域,高速铁路作为一种快速、安全、环保的交通方式,发展迅猛。然而,在长隧道环境下,高速列车的定位问题成为一项具有挑战性的课题。本论文将探讨在长隧道环境下,高速铁路列车的高精度定位问题,并提出相应的研究方法。一、引言随着高速铁路的不断发展壮大,越来越多的高速铁路线路需要穿越长隧道,这给高速列车的精确定位带来了新的挑战。长隧道环境下,由于信号的衰减和多径效应等因素的存在,传统的定位技术难以满足高精度定位的需求。因此,研究长隧道环境下高速铁路列车的高精度定位问
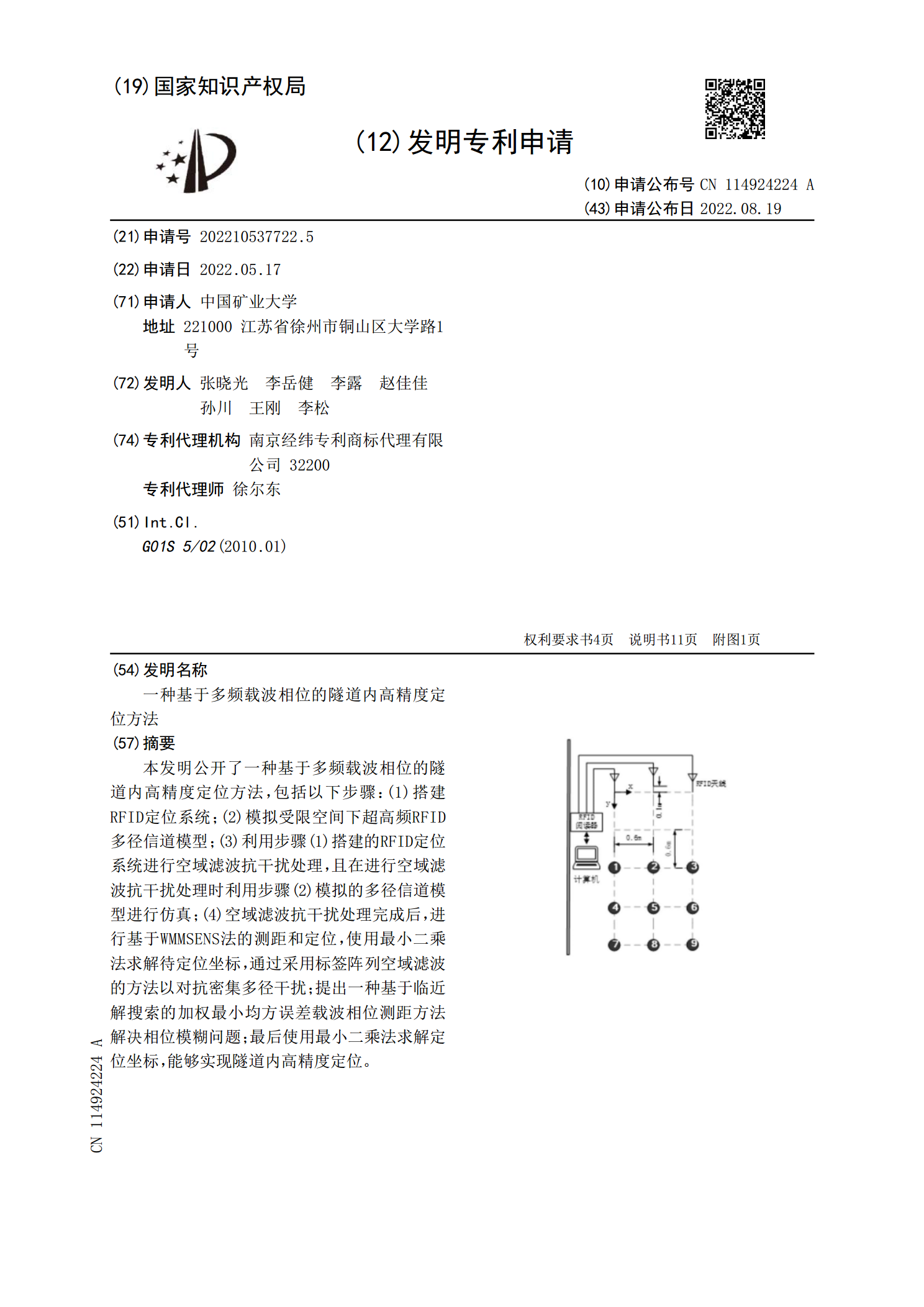
一种基于多频载波相位的隧道内高精度定位方法.pdf
本发明公开了一种基于多频载波相位的隧道内高精度定位方法,包括以下步骤:(1)搭建RFID定位系统;(2)模拟受限空间下超高频RFID多径信道模型;(3)利用步骤(1)搭建的RFID定位系统进行空域滤波抗干扰处理,且在进行空域滤波抗干扰处理时利用步骤(2)模拟的多径信道模型进行仿真;(4)空域滤波抗干扰处理完成后,进行基于WMMSENS法的测距和定位,使用最小二乘法求解待定位坐标,通过采用标签阵列空域滤波的方法以对抗密集多径干扰;提出一种基于临近解搜索的加权最小均方误差载波相位测距方法解决相位模糊问题;最后