
视觉导航中移动机器人的一种定位和导航方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

视觉导航中移动机器人的一种定位和导航方法.docx
视觉导航中移动机器人的一种定位和导航方法一、引言随着科技的不断发展,移动机器人正在越来越成为人们生活中不可或缺的一部分。其中,视觉导航技术在机器人定位和导航方面有着广泛的应用,也是目前研究的热点之一。本篇论文将对一种基于视觉导航的移动机器人定位和导航方法进行详细介绍。二、研究背景目前,移动机器人在实际使用中需要具有准确的定位和导航能力。传统的定位和导航方法通常采用GPS和惯性导航等技术,但这些方法存在一些局限性,如受天气影响,定位不准确,导航精度不高等。而基于视觉导航的方法,可以利用机器人自身所拥有的摄像

视觉导航中移动机器人的一种定位和导航方法的任务书.docx
视觉导航中移动机器人的一种定位和导航方法的任务书一、背景随着智能机器人技术的不断发展,移动机器人的应用越来越广泛,其中视觉导航技术作为移动机器人最为常见的定位和导航方法之一,在工业自动化、无人驾驶、智能家居等领域得到了广泛应用。视觉导航技术是一种利用相机或激光雷达等传感器实时获取环境信息,通过机器视觉算法处理后实现机器人定位和导航目标的技术。相比于传统的定位与导航方法,视觉导航技术可以实现更加精准,实时性更高的定位和导航功能,同时还可以更加灵活地适应环境变化,具有很强的普适性。本次任务就是基于视觉导航技术

一种基于视觉的机器人室内定位导航方法.pdf
本发明公开了一种基于视觉的机器人室内定位导航方法,属于视觉导航领域。该方法是根据二维码的思路,设计了一种简单方便、易于识别、内含绝对位置坐标且具有一定纠错能力的人工路标,将路标设置于天花板上,由安装在机器人上且光轴与天花板垂直的摄像机进行拍摄,再通过图像的阈值分割、连通域提取、轮廓曲线匹配以及路标特征识别一系列步骤定位路标,解析路标中所包含的坐标信息,最终通过机器人的位置估计算法获得机器人当前的绝对位置和航向角。本发明方法减少了遮挡及噪声干扰,大大降低了图像处理方法、时间以及周围环境的复杂度。

基于视觉的组合导航机器人及导航方法.pdf
本发明涉及一种基于视觉的组合导航机器人及导航方法,该机器人包括四轮驱动小车,所述小车车体上安装彩色数码摄像机;车体的前端和后端各安装若干个超声波传感器,用于检测机器人周围障碍物距离信息;车体内部安装陀螺仪,用来检测机器人姿态信息;四个光电编码器分别安装在四套伺服驱动电机上,作为里程计使用;电机控制器;机器人车体控制系统计算机,用于保证图像处理和控制的实时性。本发明的导航方法以视觉导航为主的同时,融合了里程计、陀螺仪和超声波传感器的相关信息,实现组合导航,以最大程度上提高系统的可靠性与导航精度。
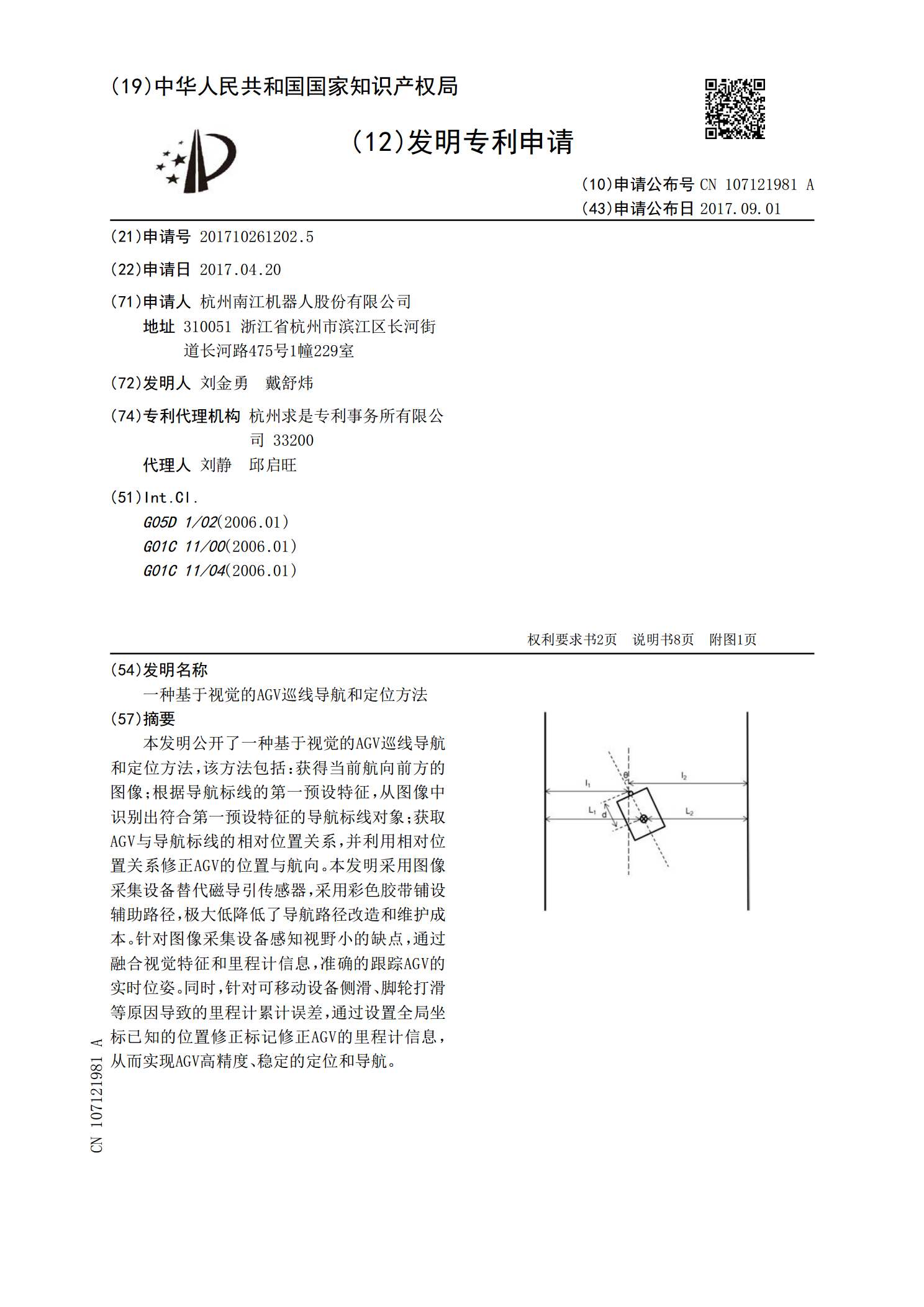
一种基于视觉的AGV巡线导航和定位方法.pdf
本发明公开了一种基于视觉的AGV巡线导航和定位方法,该方法包括:获得当前航向前方的图像;根据导航标线的第一预设特征,从图像中识别出符合第一预设特征的导航标线对象;获取AGV与导航标线的相对位置关系,并利用相对位置关系修正AGV的位置与航向。本发明采用图像采集设备替代磁导引传感器,采用彩色胶带铺设辅助路径,极大低降低了导航路径改造和维护成本。针对图像采集设备感知视野小的缺点,通过融合视觉特征和里程计信息,准确的跟踪AGV的实时位姿。同时,针对可移动设备侧滑、脚轮打滑等原因导致的里程计累计误差,通过设置全局坐