
移动机器人视觉伺服轨迹跟踪研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

移动机器人视觉伺服轨迹跟踪研究.docx
移动机器人视觉伺服轨迹跟踪研究摘要:移动机器人在日常生活中扮演着越来越重要的角色。为了实现移动机器人的自主导航和操作能力,视觉伺服技术被广泛应用于机器人系统中。本论文旨在研究移动机器人的视觉伺服轨迹跟踪问题。首先,介绍了移动机器人的视觉伺服技术的背景和意义。然后,阐述了视觉伺服技术的基本原理和方法。接着,详细讨论了移动机器人视觉伺服轨迹跟踪的关键问题,并提出了解决这些问题的方法和技术。最后,通过实验验证了提出的方法的有效性和可靠性。研究结果表明,移动机器人的视觉伺服轨迹跟踪技术能够实现高精度的轨迹跟踪和控

轮式移动机器人视觉伺服轨迹跟踪并发深度辨识.pdf
一种轮式移动机器人视觉伺服轨迹跟踪并发深度辨识方法。本发明针对非完整运动约束下的轮式移动机器人设计了一种视觉跟踪控制方法,并能在伺服轨迹跟踪的同时辨识出场景的深度信息。首先,对共面特征点录制一段图像视频来代表待跟踪的期望轨迹。然后,通过比较静态参考图像中的特征点、实时图像中的特征点和预先录制的图像视频,结合投影几何关系建立欧式坐标系下的单应矩阵。然后通过分解所得到的单应矩阵,设计了运动控制律和关于未知深度参数的自适应更新律。通过在自适应更新率中加入并发学习算法,利用历史和当前系统数据恢复未知的深度信息。最

基于视觉的移动机器人轨迹跟踪.docx
基于视觉的移动机器人轨迹跟踪基于视觉的移动机器人轨迹跟踪摘要:移动机器人在工业自动化、服务机器人和无人驾驶汽车等领域得到广泛应用。为了实现准确的导航和路径跟踪,视觉技术被广泛应用于移动机器人中。本文讨论了基于视觉的移动机器人轨迹跟踪的方法和技术,并探讨了其在实际应用中的挑战和未来发展的方向。1.引言移动机器人的轨迹跟踪是指机器人在给定的轨迹上进行准确移动的能力。准确的轨迹跟踪对于机器人的导航和控制至关重要。传统的轨迹跟踪方法主要依赖于传感器数据,如激光雷达和编码器。然而,这些方法在某些情况下存在局限性,例

移动机器人混合视觉轨迹跟踪策略.pdf
本发明公开一种移动机器人混合视觉轨迹跟踪策略。针对配备有车载视觉系统的轮式移动机器人提出了视觉轨迹跟踪控制方法,其中利用2.5维视觉伺服框架使视觉特征易于维持在摄像机视野范围内,进而改善视觉轨迹跟踪的效果。首先,根据当前图像、参考图像和期望图像序列,由图像特征和机器人朝向设计出混合形式的系统误差。之后引入了新的系统误差,做相应变换后导出了开环系统误差方程。基于此,设计了一种自适应控制器以实现视觉伺服轨迹跟踪任务,其中通过参数更新机制补偿特征点深度。根据Lyapunov方法和Barbalat引理,证明出所提
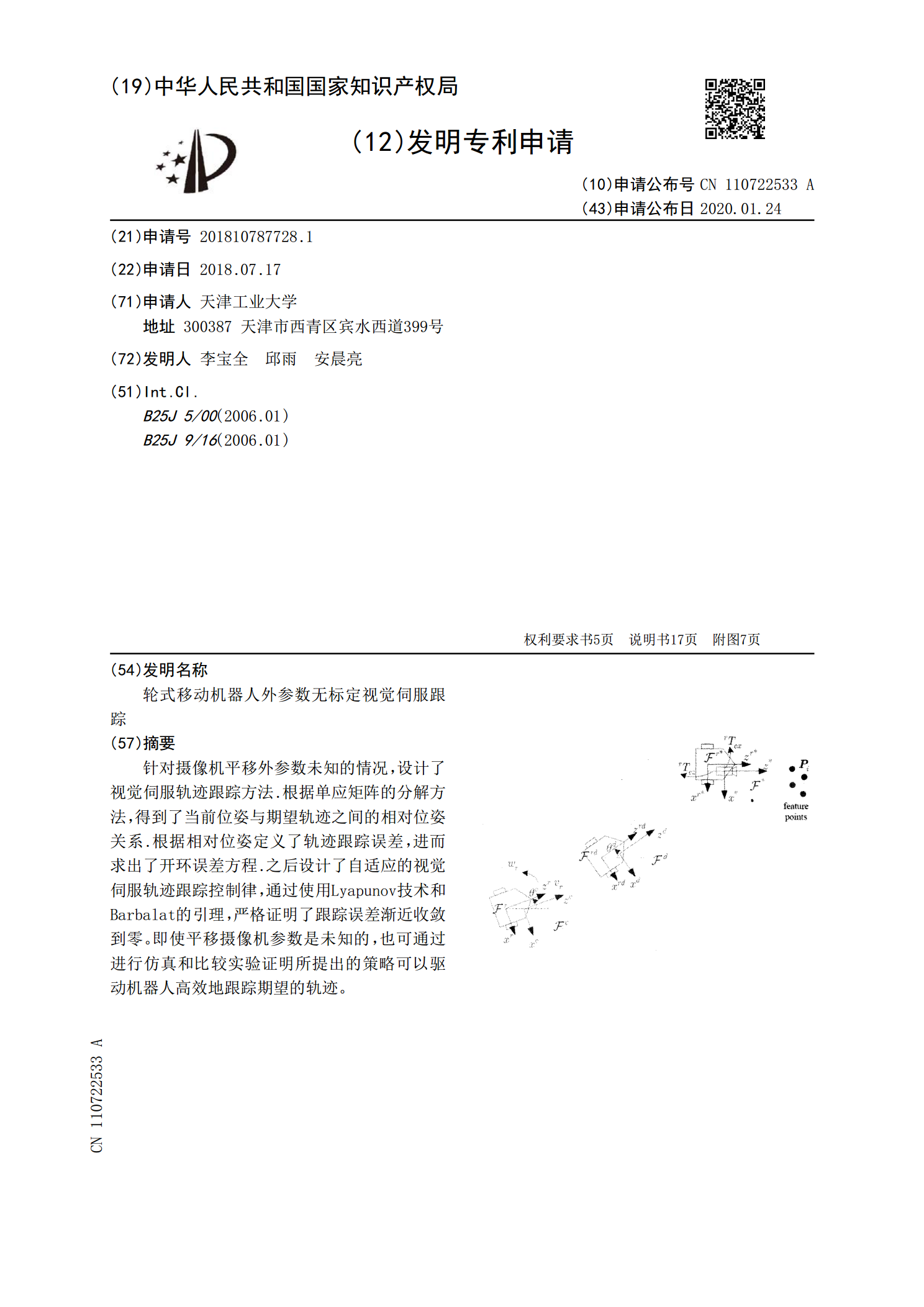
轮式移动机器人外参数无标定视觉伺服跟踪.pdf
针对摄像机平移外参数未知的情况,设计了视觉伺服轨迹跟踪方法.根据单应矩阵的分解方法,得到了当前位姿与期望轨迹之间的相对位姿关系.根据相对位姿定义了轨迹跟踪误差,进而求出了开环误差方程.之后设计了自适应的视觉伺服轨迹跟踪控制律,通过使用Lyapunov技术和Barbalat的引理,严格证明了跟踪误差渐近收敛到零。即使平移摄像机参数是未知的,也可通过进行仿真和比较实验证明所提出的策略可以驱动机器人高效地跟踪期望的轨迹。