
水下机器人浮力调节系统及其深度控制技术研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水下机器人浮力调节系统及其深度控制技术研究.docx
水下机器人浮力调节系统及其深度控制技术研究水下机器人浮力调节系统及其深度控制技术研究摘要:水下机器人是近年来迅速发展的新兴领域,在水下勘探、水下作业、水下探测等领域有着广泛的应用。本文主要研究水下机器人的浮力调节系统及其深度控制技术。首先分析了水下机器人的基本结构,并介绍了陆地机器人控制和水下机器人控制的差异。其次,详细介绍了水下机器人的浮力调节系统的设计,包括浮力调节方式、气囊控制方式、气囊布置和灵敏性设计等方面。最后,提出了在水下机器人控制中应用的深度控制算法。通过对这些控制技术的分析和研究,可以为提

一种微小型水下机器人浮力调节系统.pdf
本发明提供了一种微小型水下机器人的浮力调节系统,属于水下机器人领域,包括浮力调节部分和浮力调平部分,所述浮力调节部分电机轴与小齿轮相连,小齿轮与大齿轮啮合,大齿轮与丝杠相连,丝杠与活塞固连,丝杠螺母连接大限位片和直小电位计,活塞缸底盖用测压管连接过滤器;配平部分丝杠电机的丝杆螺母与小限位片、大电位计和配平铅块相连。本发明的有益效果为:采用这种机械式调节方式可通过齿轮连接丝杆直接带动活塞移动,结构紧凑简单,通过小电位计可对吸水量和排水量进行准确的计量,以达到对浮力调节的精准控制。调平部分通过调平铅块的移动来
浮力调节式海洋养殖网箱及其水下控制装置.pdf
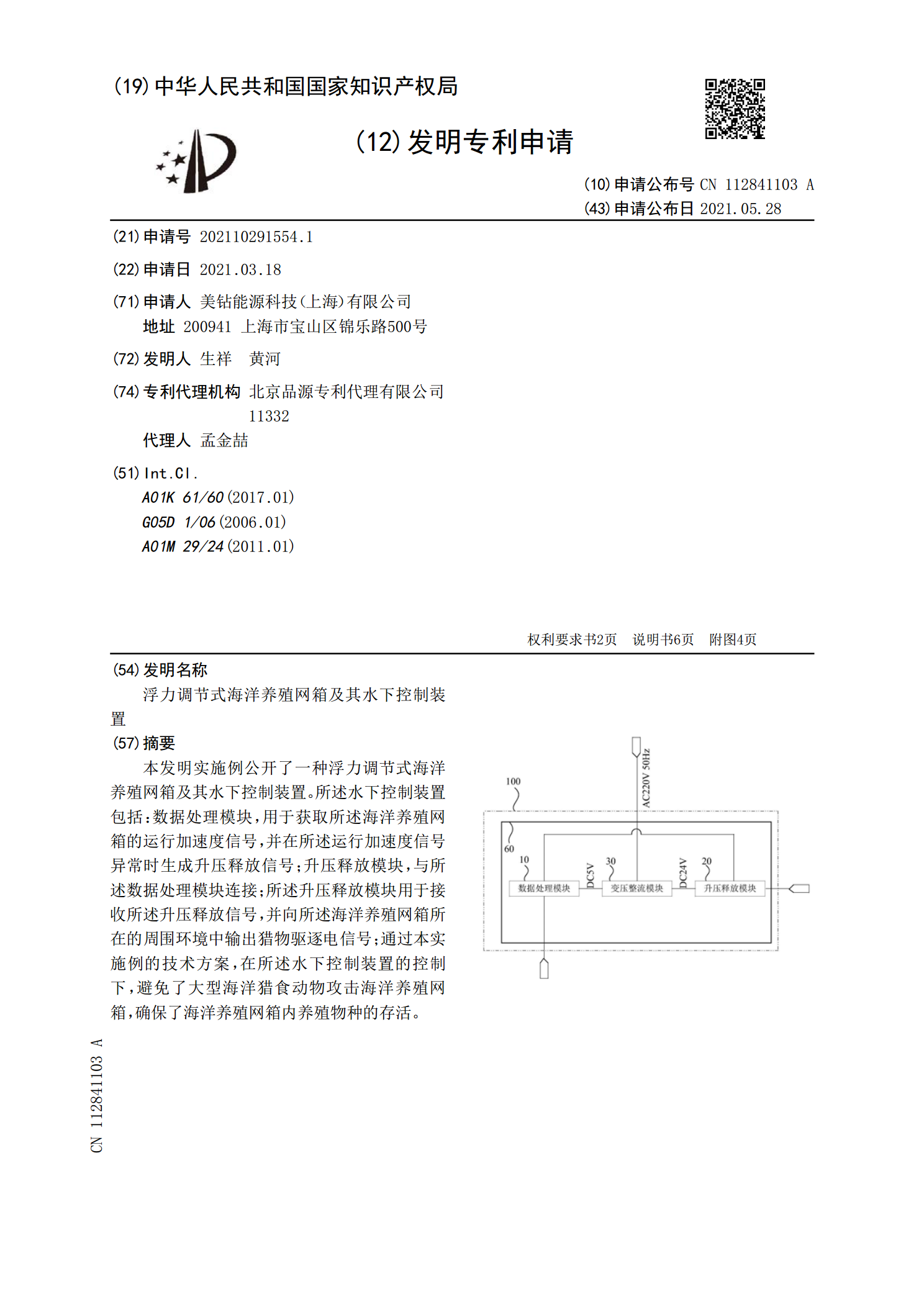
本发明实施例公开了一种浮力调节式海洋养殖网箱及其水下控制装置。所述水下控制装置包括:数据处理模块,用于获取所述海洋养殖网箱的运行加速度信号,并在所述运行加速度信号异常时生成升压释放信号;升压释放模块,与所述数据处理模块连接;所述升压释放模块用于接收所述升压释放信号,并向所述海洋养殖网箱所在的周围环境中输出猎物驱逐电信号;通过本实施例的技术方案,在所述水下控制装置的控制下,避免了大型海洋猎食动物攻击海洋养殖网箱,确保了海洋养殖网箱内养殖物种的存活。

自主水下机器人模块化浮力调节技术研究的开题报告.docx
自主水下机器人模块化浮力调节技术研究的开题报告一、选题背景水下机器人是一种可以代替人类进行水下勘察、测量、采样和维修等任务的自主机器人。随着水下机器人应用领域的不断扩大,如海底油气勘探、海洋科学研究等,水下机器人已经成为科技领域发展的重要方向之一。而水下机器人的浮力调节技术是其中的重要组成部分,能够使机器人在水下完成任务时更加稳定,具有更高的可靠性。二、研究目的本次研究旨在探索一种模块化的水下机器人浮力调节技术,通过模块化设计,可以更加灵活地实现机器人对浮力的控制,从而适应不同的情境和任务需求。三、研究内

自主水下机器人模块化浮力调节技术研究的中期报告.docx
自主水下机器人模块化浮力调节技术研究的中期报告尊敬的评审专家:本次报告旨在介绍自主水下机器人模块化浮力调节技术的研究进展情况。一、研究背景水下机器人是一种能够进行水下探测、观测、维修等任务的特殊机器人,其运动方式可分为垂直上下、水平左右和绕垂直轴旋转三种。而水下机器人的运动需要通过调节浮力来实现,因此浮力调节技术是水下机器人研究的重要内容之一。传统的浮力调节技术多采用推进器和静水力调节,然而这种技术存在一些问题,例如稳定性差、调节速度慢、能耗大等。为了解决这些问题,本研究提出了一种基于模块化设计的浮力调节