
水下焊接机器人视觉传感焊缝跟踪方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水下焊接机器人视觉传感焊缝跟踪方法研究.docx
水下焊接机器人视觉传感焊缝跟踪方法研究摘要:随着水下工程的发展,水下焊接机器人在海洋工程、船舶维修等领域的应用越来越广泛。而在水下焊接过程中,实时、准确地跟踪焊缝是保证焊接质量的关键。本文针对水下焊接机器人视觉传感焊缝跟踪方法进行了研究。首先,对水下焊接机器人进行了简要介绍,并对水下焊接机器人视觉传感系统的要求进行了分析。其次,针对水下环境的特点和焊接过程的要求,提出了一种基于图像处理的焊缝检测算法。然后,结合机器人运动控制算法,实现了焊缝跟踪并进行了实验验证。最后,对研究结果进行了讨论和总结,展望了未来

基于双目视觉的机器人水下空间焊缝跟踪系统的研究.docx
基于双目视觉的机器人水下空间焊缝跟踪系统的研究基于双目视觉的机器人水下空间焊缝跟踪系统的研究摘要:随着工业自动化程度不断提高,机器人技术在各个领域得到广泛应用。本文以水下焊接为研究对象,提出了一种基于双目视觉的机器人水下空间焊缝跟踪系统。该系统采用双目视觉技术实现焊缝的三维重建和跟踪,通过机器人的自主控制和运动控制,实现水下焊接作业的自主化和智能化。通过实验验证,该系统能够有效地实现焊缝跟踪和控制,提高水下作业效率和质量,为水下焊接的自主化和智能化提供了一种新的解决方案。关键词:双目视觉;机器人;焊缝跟踪
一种水下焊接机器人焊缝跟踪系统的焊缝跟踪控制方法.pdf
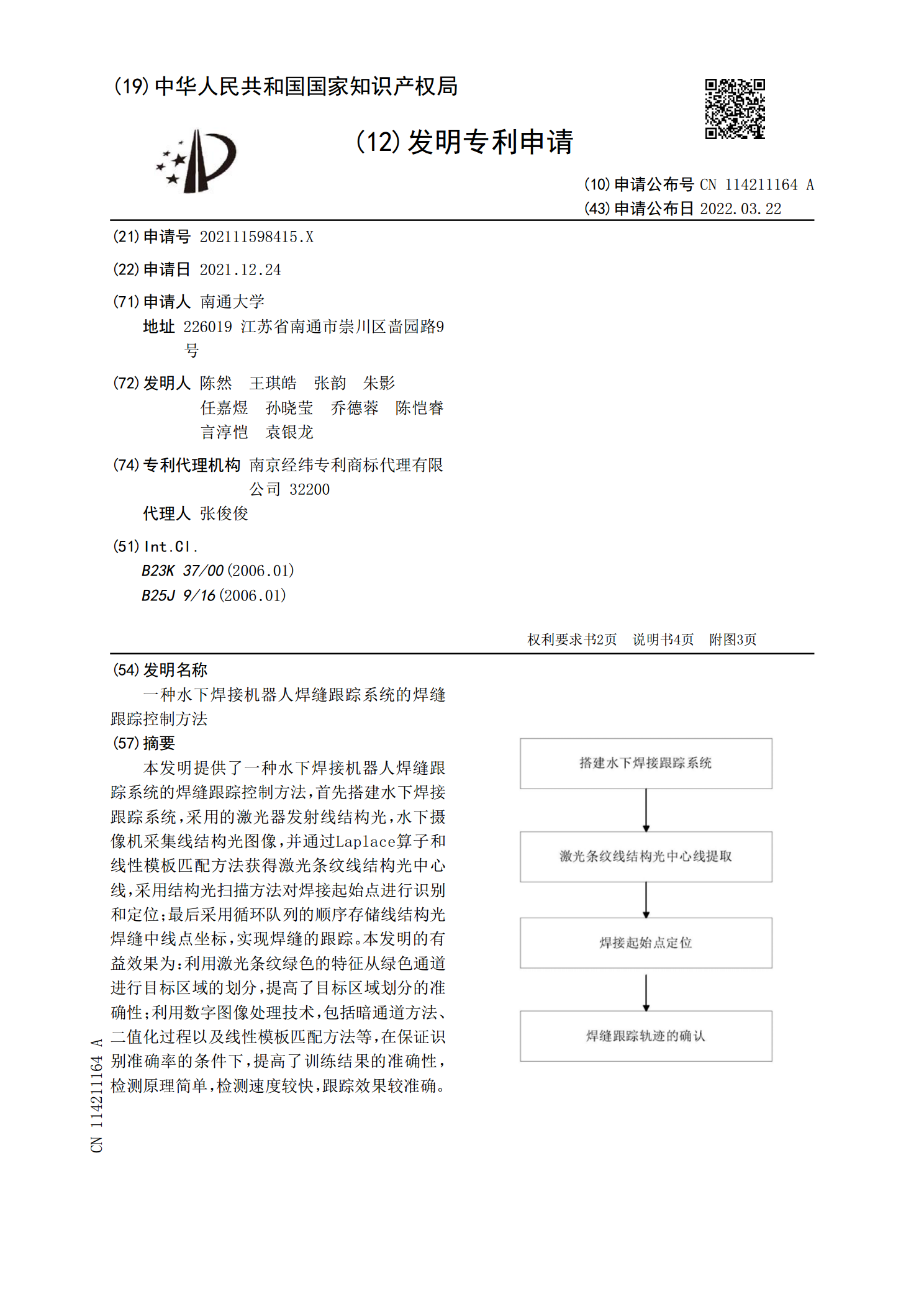
本发明提供了一种水下焊接机器人焊缝跟踪系统的焊缝跟踪控制方法,首先搭建水下焊接跟踪系统,采用的激光器发射线结构光,水下摄像机采集线结构光图像,并通过Laplace算子和线性模板匹配方法获得激光条纹线结构光中心线,采用结构光扫描方法对焊接起始点进行识别和定位;最后采用循环队列的顺序存储线结构光焊缝中线点坐标,实现焊缝的跟踪。本发明的有益效果为:利用激光条纹绿色的特征从绿色通道进行目标区域的划分,提高了目标区域划分的准确性;利用数字图像处理技术,包括暗通道方法、二值化过程以及线性模板匹配方法等,在保证识别准确

基于双目视觉的机器人水下空间焊缝跟踪系统的研究的开题报告.docx
基于双目视觉的机器人水下空间焊缝跟踪系统的研究的开题报告1.研究背景与意义:水下焊接技术在海洋工程、船舶制造等领域具有广泛应用,但是由于水下环境的特殊性,使得水下焊接工作面临着很多难题,如焊缝跟踪问题。传统的焊缝跟踪装置只能在空气环境下工作,难以满足水下焊接的需求。因此,开发一种基于双目视觉技术的机器人水下空间焊缝跟踪系统有着重要意义。2.研究内容与目标:本论文旨在通过结合机器人技术和双目视觉技术,设计一种具有较高精度和稳定性的机器人水下空间焊缝跟踪系统,使焊缝在水下环境中能够被快速、准确地识别和跟踪。具

基于电弧传感的焊接专机焊缝跟踪方法研究与实现的综述报告.docx
基于电弧传感的焊接专机焊缝跟踪方法研究与实现的综述报告电弧传感是一种广泛应用于工业领域的技术,特别是在焊接过程中,电弧传感技术被用于控制和监测焊接过程的质量。针对这一需求,一些研究者提出了基于电弧传感的焊接专机焊缝跟踪方法,以提高焊接安全性和生产效率。电弧传感技术是通过监测焊接过程中的电弧信号变化来进行实时控制和监控。而焊接专机焊缝跟踪方法则是通过对焊接电极进行控制,使其沿着焊缝轨迹移动,从而实现自动适应焊接不规则曲线的功能。针对这一需求,研究者们提出了多种方法,在此进行综述。首先,基于传感器控制电极移动