
巡检机器人底盘结构设计及其振动特性研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

巡检机器人底盘结构设计及其振动特性研究.docx
巡检机器人底盘结构设计及其振动特性研究巡检机器人底盘结构设计及其振动特性研究摘要:随着科技的不断进步,机器人在各个领域得到了广泛应用。机器人底盘作为机器人的重要组成部分,其结构设计对机器人的运动性能和稳定性有着重要影响。本文通过对巡检机器人底盘结构的研究和振动特性的分析,旨在提供一种优化的设计方案,以提高巡检机器人的工作效率和稳定性。一、引言随着各种自动化设备在工业生产中的广泛应用,机器人作为一种自动化控制系统已成为工业控制领域的一个重要研究课题。而机器人底盘作为机器人的移动平台,其结构设计对机器人的运动

巡检机器人底盘结构设计及其振动特性研究的开题报告.docx
巡检机器人底盘结构设计及其振动特性研究的开题报告【开题报告】题目:巡检机器人底盘结构设计及其振动特性研究一、选题背景近年来,随着机器人技术的迅猛发展,巡检机器人在安全监测、环境监控、物流配送等领域得到了广泛应用。其中,巡检机器人底盘作为机器人的关键组成部分,直接影响着机器人的运动性能、稳定性和工作效率等方面。因此,对巡检机器人底盘结构设计及其振动特性研究具有重要意义。目前,国内外已有一些学者对巡检机器人底盘结构进行过研究,主要集中在底盘的材料、形状等方面。但是,底盘的振动特性研究相对较少,而底盘的振动特性

四臂式巡检机器人结构设计及越障特性研究.docx
四臂式巡检机器人结构设计及越障特性研究标题:四臂式巡检机器人结构设计及越障特性研究摘要:本论文研究了四臂式巡检机器人的结构设计及其越障特性。首先,通过对目前巡检机器人的发展状况进行分析,确定了四臂式结构的优势和应用场景。接着,介绍了巡检机器人的基本结构和工作原理,并详细探讨了四臂式机器人的设计思路及其各部分构成。在此基础上,分析了机器人的越障特性,包括机器人对不同障碍物的识别与应对策略。最后,通过实验验证了所提出的四臂式巡检机器人的设计和越障特性,结果表明该机器人具有较高的稳定性和灵活性,能够有效地进行巡
一种室内巡检机器人及其底盘结构.pdf
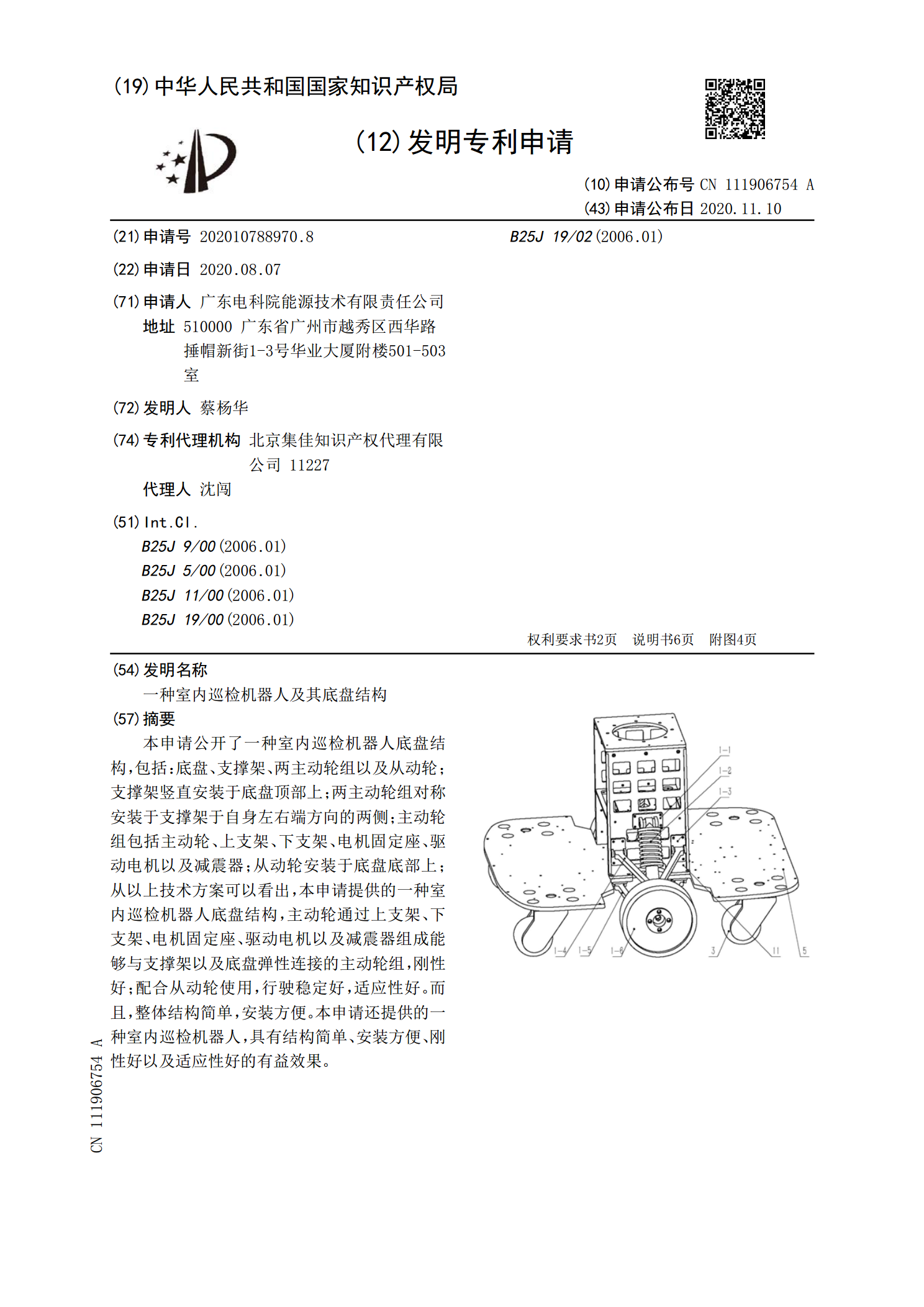
本申请公开了一种室内巡检机器人底盘结构,包括:底盘、支撑架、两主动轮组以及从动轮;支撑架竖直安装于底盘顶部上;两主动轮组对称安装于支撑架于自身左右端方向的两侧;主动轮组包括主动轮、上支架、下支架、电机固定座、驱动电机以及减震器;从动轮安装于底盘底部上;从以上技术方案可以看出,本申请提供的一种室内巡检机器人底盘结构,主动轮通过上支架、下支架、电机固定座、驱动电机以及减震器组成能够与支撑架以及底盘弹性连接的主动轮组,刚性好;配合从动轮使用,行驶稳定好,适应性好。而且,整体结构简单,安装方便。本申请还提供的一种

四臂式巡检机器人结构设计及越障特性研究的开题报告.docx
四臂式巡检机器人结构设计及越障特性研究的开题报告一、研究背景随着机器人技术的不断发展和成熟,机器人已经在许多领域得到了广泛应用,例如工业生产、物流配送以及科学研究等。其中,巡检机器人在现代工业生产中占据了非常重要的地位。巡检机器人可以在有害或不安全的工作环境中代替人类进行巡检任务,具有巡检效率高、巡检精度高、工作危险性小、节省人力物力等优点。四臂式巡检机器人是一种新型的巡检机器人,其外形类似于蜘蛛,可以在地面、墙壁甚至天花板等不同场地上行走。为了确保机器人的稳定性和性能,设计一种合理的结构和越障特性显得格