
基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究.docx
基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究摘要本研究基于电子差速的轮边驱动电动汽车动力驱动系统,通过仿真研究的方式,探讨了该系统的性能和特点。首先,介绍了电动汽车的发展历程和现状,并简要分析了轮边驱动系统的优点和缺点。接着,详细阐述了电子差速技术的原理和应用,同时设计了仿真模型,模拟了电子差速系统的工作过程。最后,通过仿真结果分析了电子差速系统在提高车辆操控性方面的作用。关键词:电动汽车、轮边驱动、电子差速、仿真研究AbstractThisstudyisbasedonthepowerdrivesy

基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究的综述报告.docx
基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究的综述报告随着社会的不断发展和人口的增加,环境问题日益受到关注,而这也加速了新能源汽车领域的发展。其中,轮边驱动电动汽车作为一种新型的汽车动力驱动系统,在提高车辆能效和节能环保方面发挥了重要作用。本文将对基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究进行综述。一、电子差速理论介绍电子差速是一种通过电子控制实现的差速器,与机械式差速器相比,具有响应更迅速、更精确的优势。其主要由动力电机、制动器、电控系统等组成。电子差速可实现车轮转速的不同化控制,使得在不

基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究的任务书.docx
基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究的任务书任务书任务名称:基于电子差速的轮边驱动电动汽车动力驱动系统仿真研究任务背景:随着环保和节能意识的不断增强,汽车行业正逐渐向电动化方向发展。在电动汽车技术领域,轮边驱动技术是其中具有发展潜力的重要方向。电子差速器作为一种新型的差速器装置,可以实现轮边驱动电动汽车动力驱动系统优化,提高车辆的能效与性能,因此在电动汽车的应用中具有重要的意义。在轮边驱动技术研究中,仿真实验是一种常见的测试手段。通过对电动汽车动力驱动系统的仿真研究,可以对构建系统模型进行优
四轮驱动电动汽车电子差速控制方法及系统.pdf
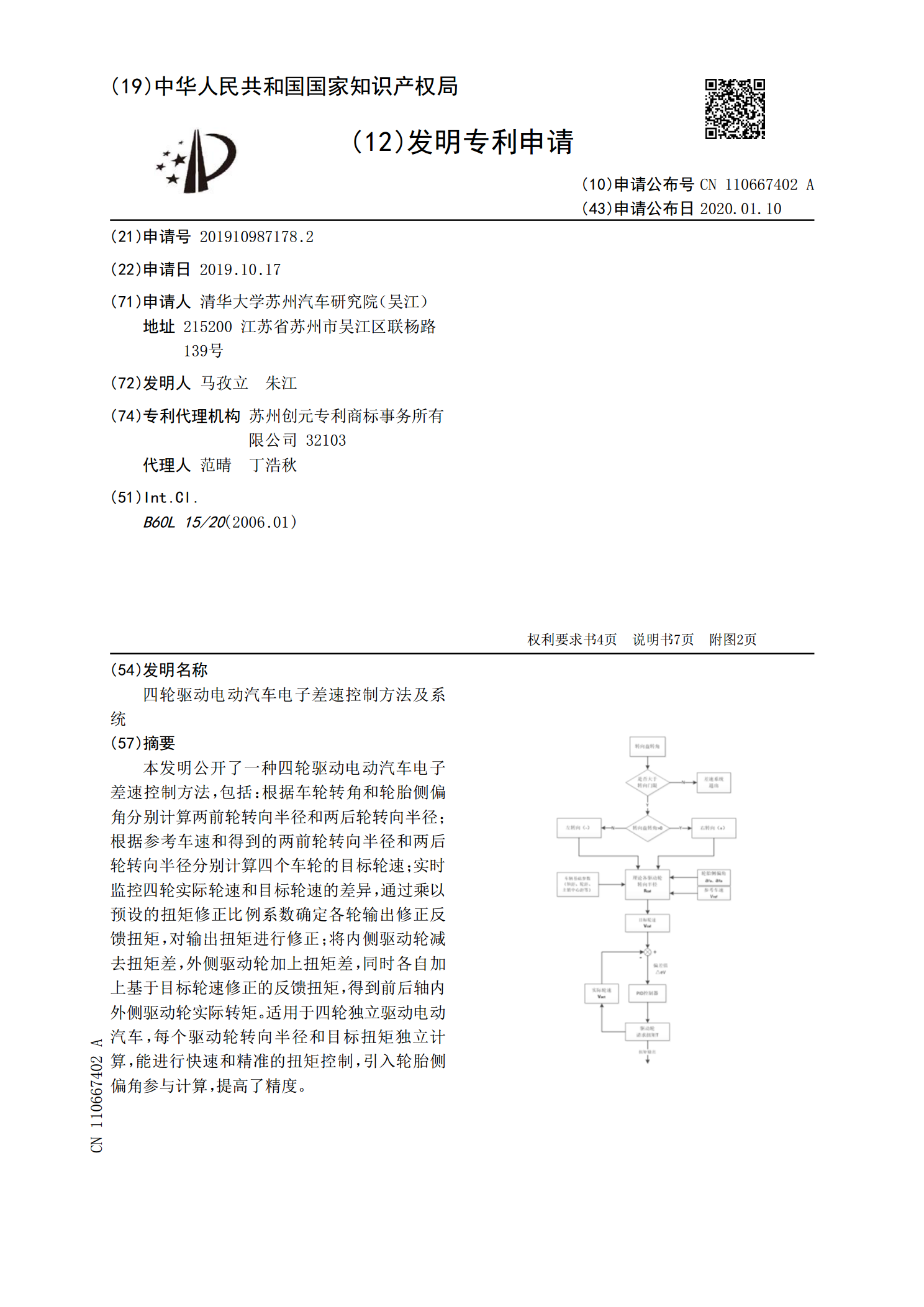
本发明公开了一种四轮驱动电动汽车电子差速控制方法,包括:根据车轮转角和轮胎侧偏角分别计算两前轮转向半径和两后轮转向半径;根据参考车速和得到的两前轮转向半径和两后轮转向半径分别计算四个车轮的目标轮速;实时监控四轮实际轮速和目标轮速的差异,通过乘以预设的扭矩修正比例系数确定各轮输出修正反馈扭矩,对输出扭矩进行修正;将内侧驱动轮减去扭矩差,外侧驱动轮加上扭矩差,同时各自加上基于目标轮速修正的反馈扭矩,得到前后轴内外侧驱动轮实际转矩。适用于四轮独立驱动电动汽车,每个驱动轮转向半径和目标扭矩独立计算,能进行快速和精
轮毂驱动电动汽车的电子差速控制系统.pdf
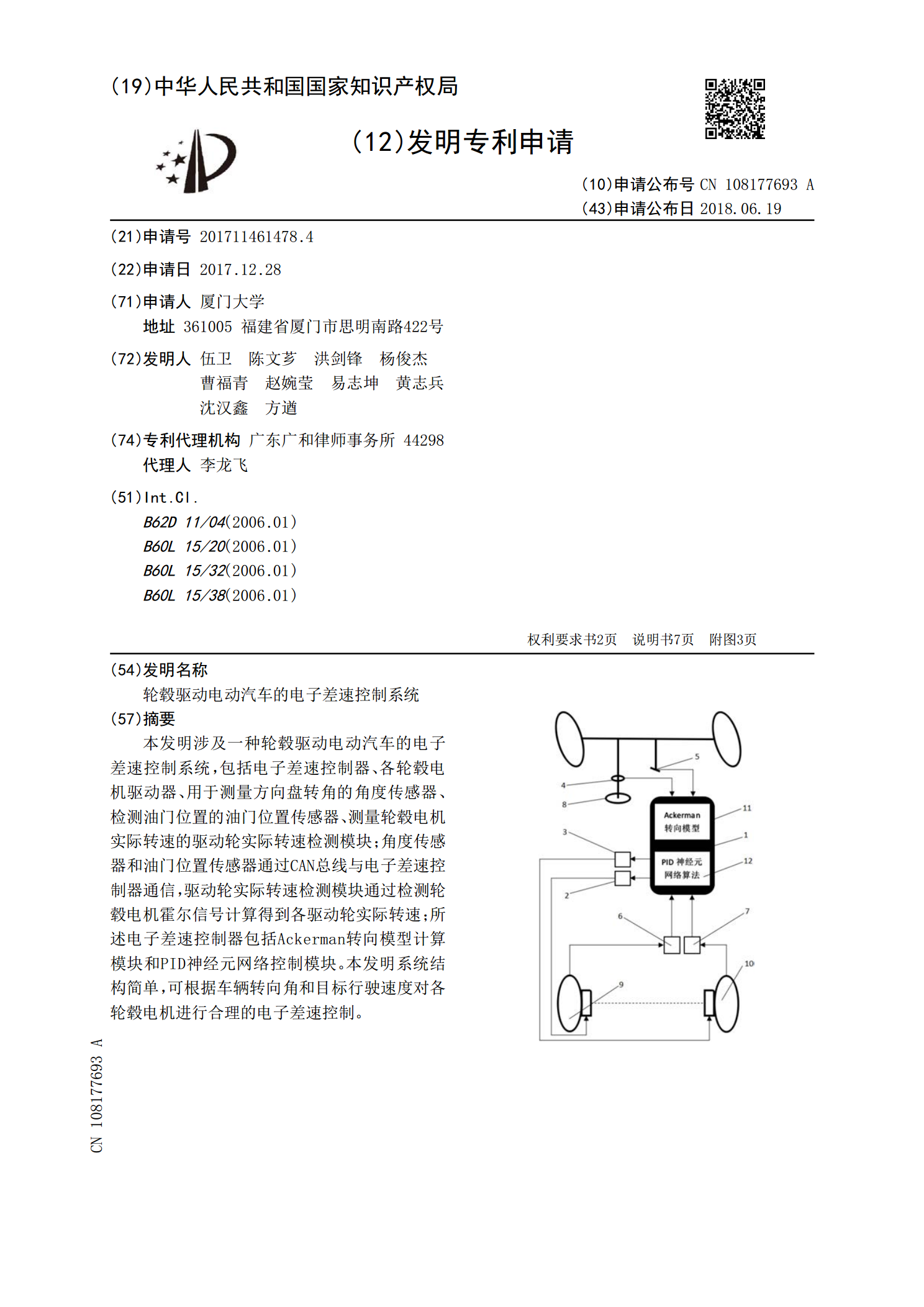
本发明涉及一种轮毂驱动电动汽车的电子差速控制系统,包括电子差速控制器、各轮毂电机驱动器、用于测量方向盘转角的角度传感器、检测油门位置的油门位置传感器、测量轮毂电机实际转速的驱动轮实际转速检测模块;角度传感器和油门位置传感器通过CAN总线与电子差速控制器通信,驱动轮实际转速检测模块通过检测轮毂电机霍尔信号计算得到各驱动轮实际转速;所述电子差速控制器包括Ackerman转向模型计算模块和PID神经元网络控制模块。本发明系统结构简单,可根据车辆转向角和目标行驶速度对各轮毂电机进行合理的电子差速控制。