
基于Solidworks和AMESim的新型可遥控缆索集材跑车设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Solidworks和AMESim的新型可遥控缆索集材跑车设计.docx
基于Solidworks和AMESim的新型可遥控缆索集材跑车设计新型可远程控制缆索集材跑车的设计摘要本论文基于Solidworks和AMESim平台,设计了一种新型可远程控制的缆索集材跑车。该跑车采用缆索驱动和集材功能,在野外作业中具有较高的灵活性和适应性。通过使用Solidworks进行跑车的机械设计,并利用AMESim模拟系统动力学,验证了跑车的运动特性和工作性能。关键词:远程控制;缆索集材跑车;机械设计;AMESim;系统动力学引言远程控制集材车是一种在野外作业中常见的机械设备,它具有收集和运输材

基于Solidworks和AMESim的新型可遥控缆索集材跑车设计的开题报告.docx
基于Solidworks和AMESim的新型可遥控缆索集材跑车设计的开题报告1.研究背景及意义目前,随着自动化技术的不断发展与应用,自动化集材技术也迈上了新的台阶。可随意遥控的集材跑车成为了自动化集材的重要工具之一。传统的集材跑车存在的问题是受到地形和环境的限制,不能适应不同的集材环境,同时在操作中对人员的安全也存在一定的隐患。因此,基于将现代科学技术与集材技术相结合,设计出一种能适应多种集材环境并且可以遥控的新型可随意遥控的集材跑车有着积极的研究和应用意义。2.研究内容和技术路线本研究主要使用Solid

一种可遥控双联制动缆索起重机跑车.pdf
本发明公开了一种可遥控双联制动缆索起重机跑车,包括车体以及固定安装在车体内的用于将跑车悬挂在承载索上的行走滑轮和用于承托起重索的起重滑轮;车体内还安装有反向双联互锁液压制动器和工作电源;其中,所述的反向双联互锁液压制动器包括液压遥控控制系统、设置在承载索上下侧的固定制动蹄A与承载索制动蹄、设置在起重索上下侧的固定制动蹄B与起重索制动蹄。本发明具有可遥控的反向双联互锁液压制动器,可实现对承载索和起重索的互锁制动,从而省掉专门的跑车牵引索,使集材缆索起重机的动力绞盘系统和缆索系统大为简化,提高了缆索起重机在林

基于LabVIEW和myRIO的遥控跑车加速度检测系统.docx
基于LabVIEW和myRIO的遥控跑车加速度检测系统标题:基于LabVIEW和myRIO的遥控跑车加速度检测系统摘要:近年来,随着科技的发展,遥控跑车已经成为人们娱乐和竞技的一种常见方式。在遥控跑车运动过程中,了解其加速度的变化对于性能优化和安全控制至关重要。本文提出了一种基于LabVIEW和myRIO的遥控跑车加速度检测系统,该系统利用LabVIEW图形化编程环境和myRIO嵌入式硬件平台实现了实时的加速度检测和数据分析。实验结果表明,该系统具有较高的准确性和可靠性,可为遥控跑车用户提供实时的加速度数
缆索起重机用跑车.pdf
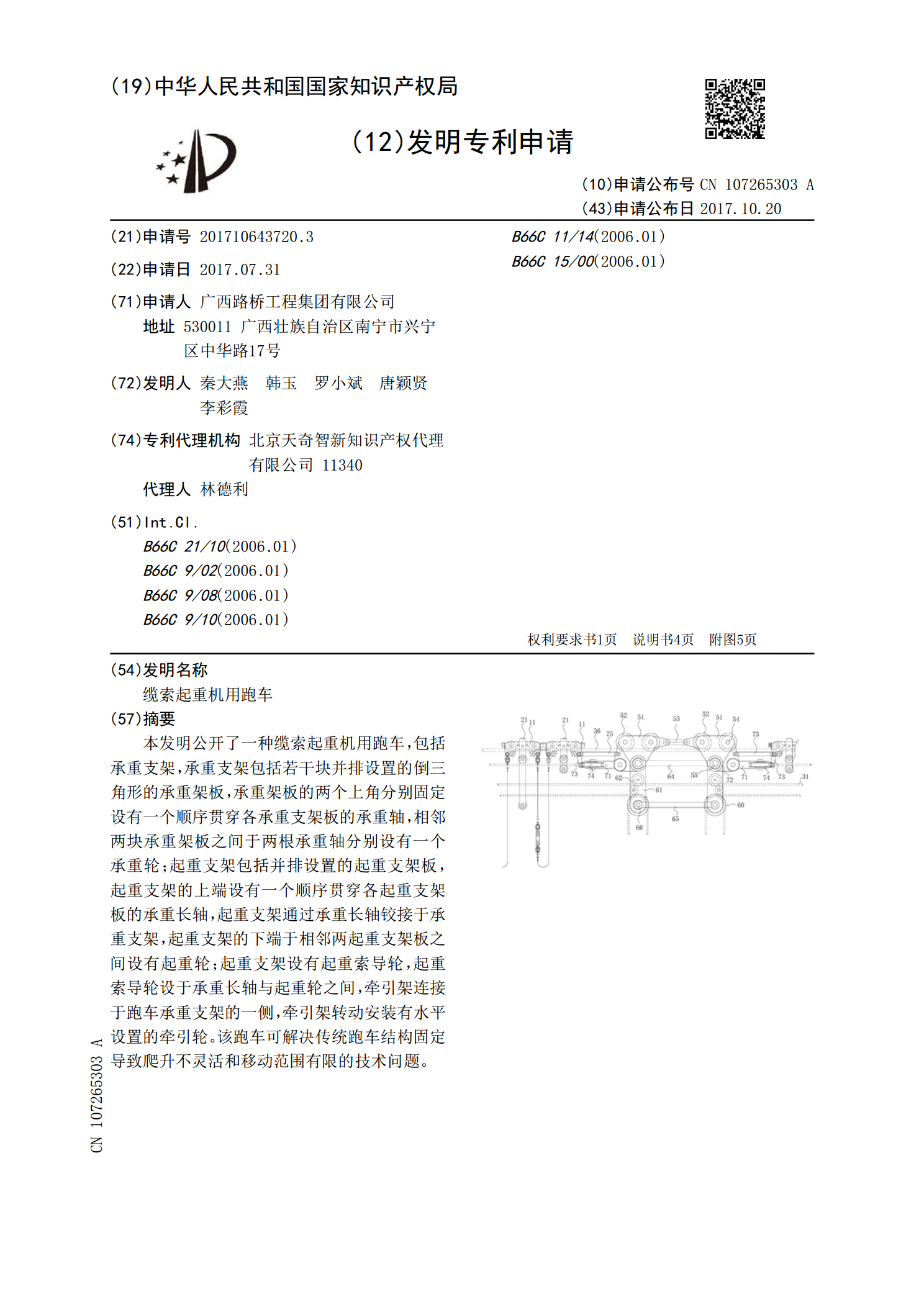
本发明公开了一种缆索起重机用跑车,包括承重支架,承重支架包括若干块并排设置的倒三角形的承重架板,承重架板的两个上角分别固定设有一个顺序贯穿各承重支架板的承重轴,相邻两块承重架板之间于两根承重轴分别设有一个承重轮;起重支架包括并排设置的起重支架板,起重支架的上端设有一个顺序贯穿各起重支架板的承重长轴,起重支架通过承重长轴铰接于承重支架,起重支架的下端于相邻两起重支架板之间设有起重轮;起重支架设有起重索导轮,起重索导轮设于承重长轴与起重轮之间,牵引架连接于跑车承重支架的一侧,牵引架转动安装有水平设置的牵引轮。