
基于CAN总线的远程控制及信息发布一体系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CAN总线的远程控制及信息发布一体系统.docx
基于CAN总线的远程控制及信息发布一体系统基于CAN总线的远程控制及信息发布一体系统摘要:随着现代科技的飞速发展,远程控制和信息发布的需求在工业自动化领域中愈发突出。本论文基于CAN总线技术,提出了一个基于CAN总线的远程控制及信息发布一体系统。该系统通过CAN总线实现了远程设备的控制和信息的发布,具有实时性强、稳定性好、通讯安全性高等优点。本论文首先介绍了CAN总线的基本原理和特点,然后详细介绍了远程控制及信息发布一体系统的设计和实现过程。最后通过实验验证了该系统的可行性和有效性。关键词:CAN总线,远

基于CAN总线的远程控制及信息发布一体系统的任务书.docx
基于CAN总线的远程控制及信息发布一体系统的任务书一、项目背景随着工业自动化程度不断提高,人们对远程控制和实时信息发布的需求也越来越高。现在,基于控制器局域网(CAN)总线技术的远程控制及信息发布一体系统已成为一种广泛应用的解决方案。该系统主要采用CAN总线技术连接多个控制节点,并通过远程控制器实现对控制节点的远程控制和实时信息发布。为此,我们的项目也基于CAN总线技术构建了一个远程控制及信息发布一体化系统,旨在提供更加智能化的解决方案,满足现代工业对远程协作的需求。二、项目目标1.开发一套基于CAN总线

基于CAN总线的分布式信息发布系统.docx
基于CAN总线的分布式信息发布系统随着现代化大规模计算机网络的发展和应用场景不断增加,基于控制器局域网络(CAN)的分布式信息发布系统被广泛应用。CAN总线是一种串行通信协议,可以在控制器之间传输数据和命令,已经成为现代汽车电子控制系统和工业自动化控制系统中常用的通信标准。本论文将从以下三个方面分析基于CAN总线的分布式信息发布系统:1.CAN总线与基于CAN总线的分布式信息发布系统CAN总线是汽车电子控制系统中普遍采用的通信标准,具有高速传输、低成本、并行传输等优点。CAN总线基于广播通信模式,它可以建

基于CAN总线车辆远程控制系统.docx
基于CAN总线车辆远程控制系统Title:VehicleRemoteControlSystemBasedonCANBus1.IntroductionTheemergenceofvehicleremotecontrolsystemshassignificantlytransformedthewayweinteractwithourvehicles.TheintegrationofthesesystemswiththeControllerAreaNetwork(CAN)bustechnologyhasbrou
基于CAN 总线的城市客车信息集成控制系统.pdf
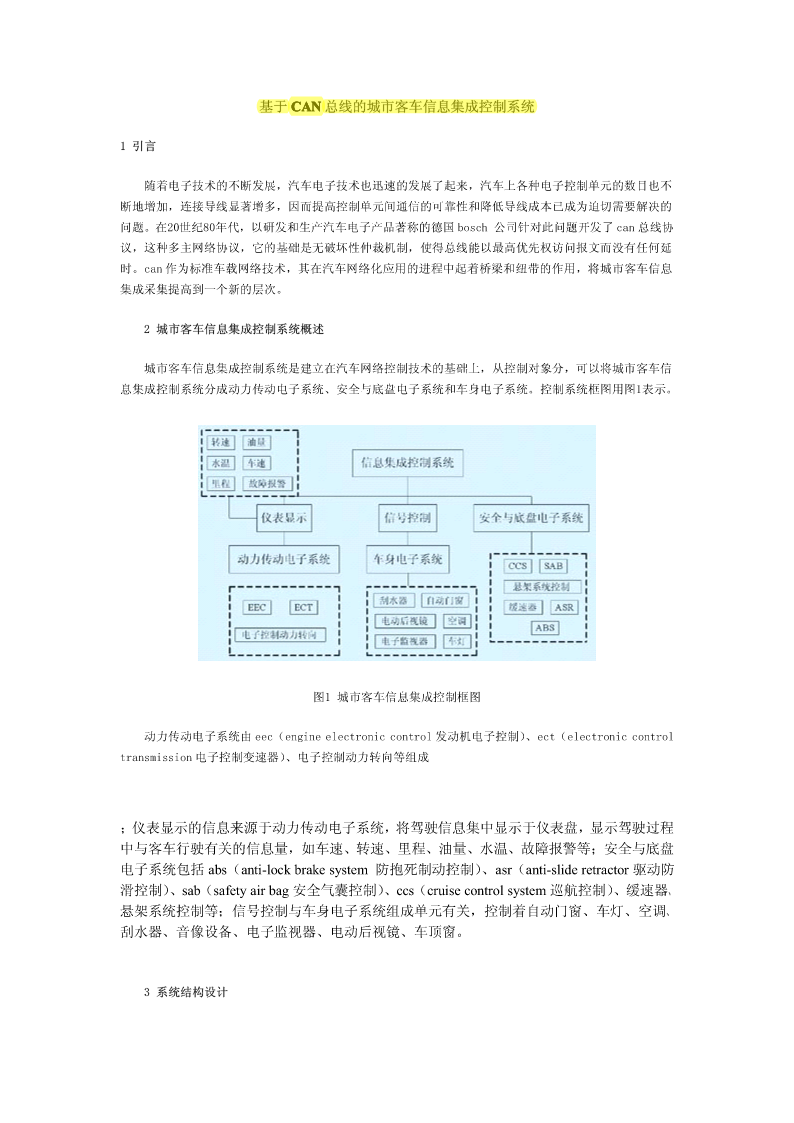
基于CAN总线的城市客车信息集成控制系统1引言随着电子技术的不断发展,汽车电子技术也迅速的发展了起来,汽车上各种电子控制单元的数目也不断地增加,连接导线显著增多,因而提高控制单元间通信的可靠性和降低导线成本已成为迫切需要解决的问题。在20世纪80年代,以研发和生产汽车电子产品著称的德国bosch公司针对此问题开发了can总线协议,这种多主网络协议,它的基础是无破坏性仲裁机制,使得总线能以最高优先权访问报文而没有任何延时。can作为标准车载网络技术,其在汽车网络化应用的进程中起着桥梁和纽带的作用,将城市客车