
双闭环直流调速系统ppt课件.ppt

天马****23


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双闭环直流调速系统ppt课件.ppt
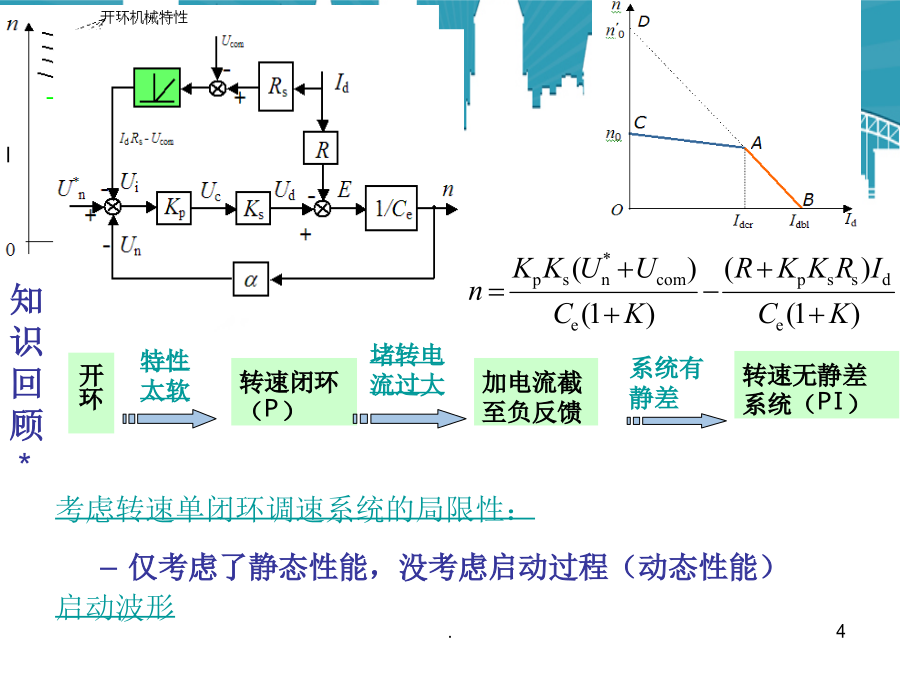
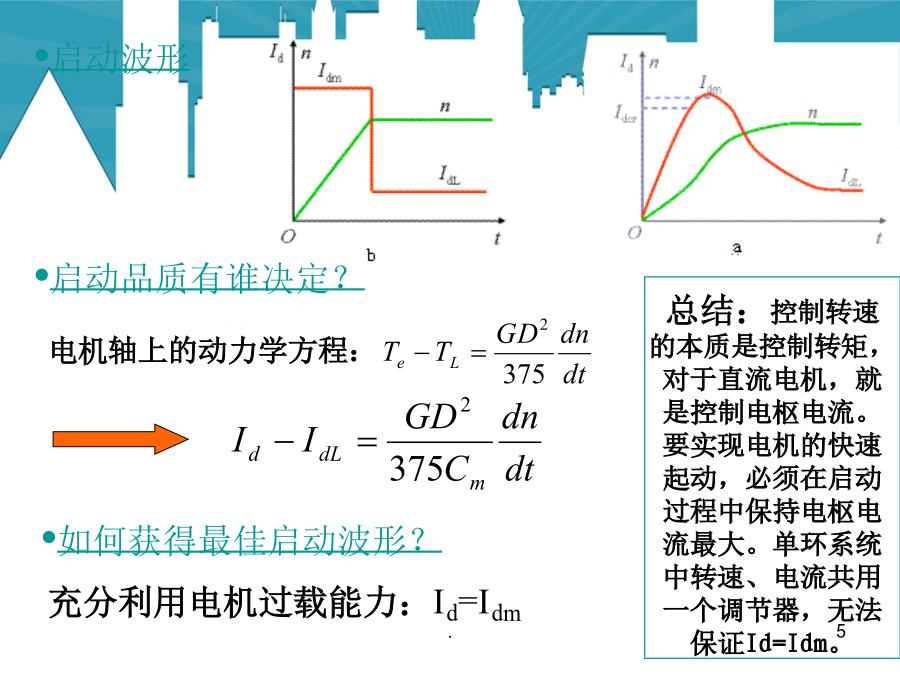
1双闭环问题的引入2转速、电流双闭环直流调速系统的组成及其静特性3双闭环直流调速系统的动态数学模型和动态性能分析4调节器的工程设计方法5双闭环调速系统的设计考虑转速单闭环调速系统的局限性:仅考虑了静态性能,没考虑启动过程(动态性能)启动波形转速、电流双闭环直流调速系统的组成及其静特性7ASR的输出电压Ui*是ACR的电流给定信号,其限幅值Uim为最大电流给定值,ASR的限幅值完全取决于电动机所允许的过载能力和系统对最大加速度的需要。ACR的输出电压限幅值Ucm,表示对最小角的限制,也表示对晶闸管整流输出电

双闭环直流调速系统仿真(Matlab)ppt课件.ppt
答辩人:王玲珑2011.05.07展示目录1.原始调速系统稳定性分析对于该系统,联系仿真实例,经计算可得其开环传递函数为2.转速、电流双闭环直流调速系统3.仿真环境中步长的选择图4工程设计法仿真模型图4.2基于GAToolbox的双闭环直流调速系统设计图7遗传算法优化设计仿真模型图性能指标对比对调速系统而言,被控制的对象是转速,通过计算可得转速环的各性能指标如下表所示Thankyou!

双闭环直流调速系统仿真(Matlab)ppt课件.ppt
答辩人:王玲珑2011.05.07展示目录1.原始调速系统稳定性分析对于该系统,联系仿真实例,经计算可得其开环传递函数为2.转速、电流双闭环直流调速系统3.仿真环境中步长的选择图4工程设计法仿真模型图4.2基于GAToolbox的双闭环直流调速系统设计图7遗传算法优化设计仿真模型图性能指标对比对调速系统而言,被控制的对象是转速,通过计算可得转速环的各性能指标如下表所示Thankyou!
双闭环直流调速系统仿真(Matlab)ppt课件.ppt
答辩人:王玲珑2011.05.07展示目录1.原始调速系统稳定性分析对于该系统,联系仿真实例,经计算可得其开环传递函数为2.转速、电流双闭环直流调速系统3.仿真环境中步长的选择图4工程设计法仿真模型图4.2基于GAToolbox的双闭环直流调速系统设计图7遗传算法优化设计仿真模型图性能指标对比对调速系统而言,被控制的对象是转速,通过计算可得转速环的各性能指标如下表所示Thankyou!

双闭环控制的直流调速系统ppt课件.ppt
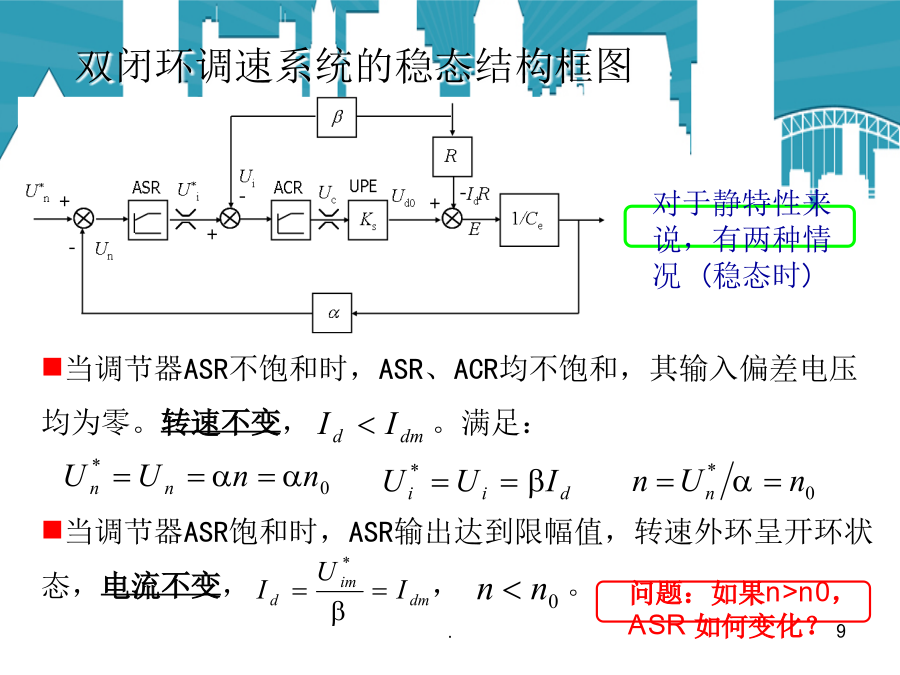
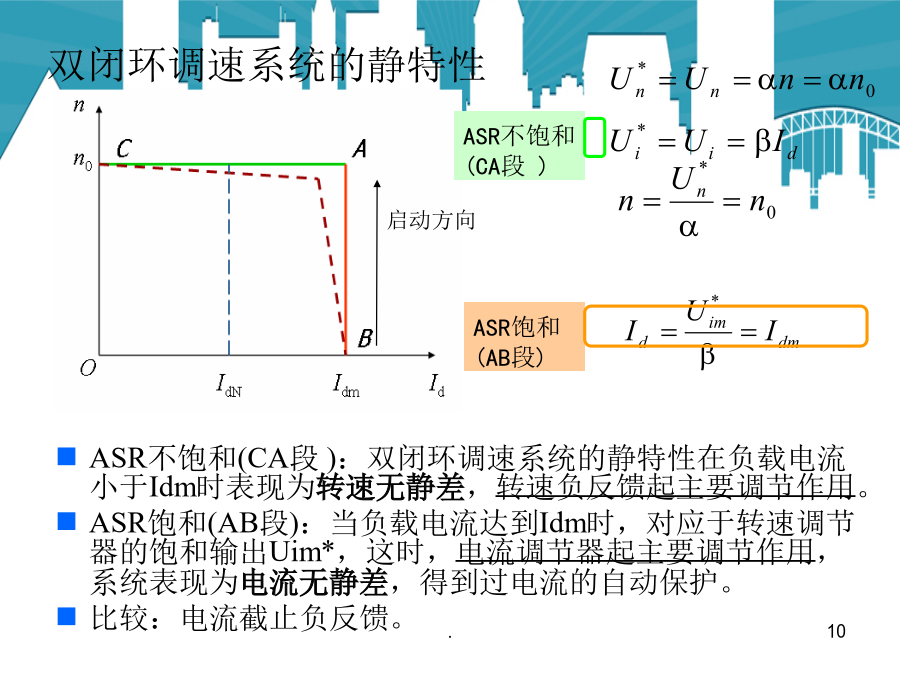
2.2转速、电流双闭环直流调速系统考虑转速单闭环调速系统的局限性:仅考虑了静态性能,没考虑启、制动过程(动态性能)未考虑对负载扰动的电流控制问题理想的启、制动波形1、原理图图2-23双闭环直流调速系统的稳态结构框图α——转速反馈系数β——电流反馈系数当调节器ASR不饱和时,ASR、ACR均不饱和,其输入偏差电压均为零。转速不变,。满足:AB段是两个调节器都不饱和时的静特性,Id<Idm,n=n0。BC段是ASR调节器饱和时的静特性,Id=Idm,n<n0。反馈系数计算二、双闭环直流调速系统的动态数学模型与