
仿蝗虫弹跳机器人的设计及动态性能分析pptx.pptx

lj****88

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
仿蝗虫弹跳机器人的设计及动态性能分析pptx.pptx
仿蝗虫弹跳机器人的设计及动态性能分析弹跳运动因其着地点的非连续性、高动态性以及强大的越障性能使得弹跳机器人拥有极强的运动能力,非常适用于军事行动、考古研究、星际探索和灾后搜救等地势复杂的领域。本文以蝗虫为仿生原型,建立仿蝗虫弹跳机器人的结构模型,并对其动态性能进行了研究,为实现高性能的仿蝗虫弹跳机器人奠定基础。(1)基于对蝗虫的生理结构及其弹跳腿的组成,通过对比分析几种不同驱动方式的优缺点确定了仿蝗虫机器人的弹跳机构动力源结构,并分别建立了两代仿蝗虫弹跳机器人的结构模型,通过分析和比较确定了最终研究的机器

仿蝗虫弹跳机器人的设计及动态性能分析.docx
仿蝗虫弹跳机器人的设计及动态性能分析Title:DesignandDynamicPerformanceAnalysisofaLocust-inspiredJumpingRobotAbstract:Thedevelopmentofbio-inspiredroboticsystemshasopenednewavenuesforvariousapplicationsinfieldssuchasscientificresearch,exploration,andsearchandrescueoperations.

仿蝗虫机器人的弹跳腿结构设计与优化.docx
仿蝗虫机器人的弹跳腿结构设计与优化摘要:本研究旨在设计和优化仿蝗虫机器人的弹跳腿结构,可应用于类似于极地探测等环境中。本文介绍了蝗虫跳跃原理及其在机器人设计中的应用,并通过前人研究、仿生学原理和模拟软件分析设计一个可行的弹跳腿结构,并对其进行仿真和优化。结果表明,本文设计的弹跳腿结构能够实现稳定、高效的跳跃动作,具有较强的适应性和鲁棒性,为机器人工程研究提供了新的思路和方法。关键词:仿生学;弹跳腿;蝗虫机器人;极地探测引言:近年来,仿生学在机器人工程领域得到了广泛应用。仿生学通过学习生物体的运动和行为,将

可行走的仿蝗虫弹跳机器人.pdf
本发明公开了一种可行走的仿蝗虫弹跳机器人,包括机架、四条腿组成的行走装置和通过齿轮连杆组成的四边形弹跳装置:四条行走腿都可以绕机架左右侧面分别转动,前后腿由连杆相连接实现异步运动,拨片与前腿固接在一起,其表面有两个凸起,驱动主轴上安装有相位上相差90度的两个异型凸轮,且前后腿之间安装有拉力弹簧,行走后腿上下肢之间用球销副相连;弹跳腿则是以五杆菱形机构为基础的储能装置;在机体内设置有控制电路、电源、传动结构和丝杠螺母结构。本发明只用两个原动件实现整个弹跳和行走的协调运动,符合蝗虫的运动特点,且整个结构简单,
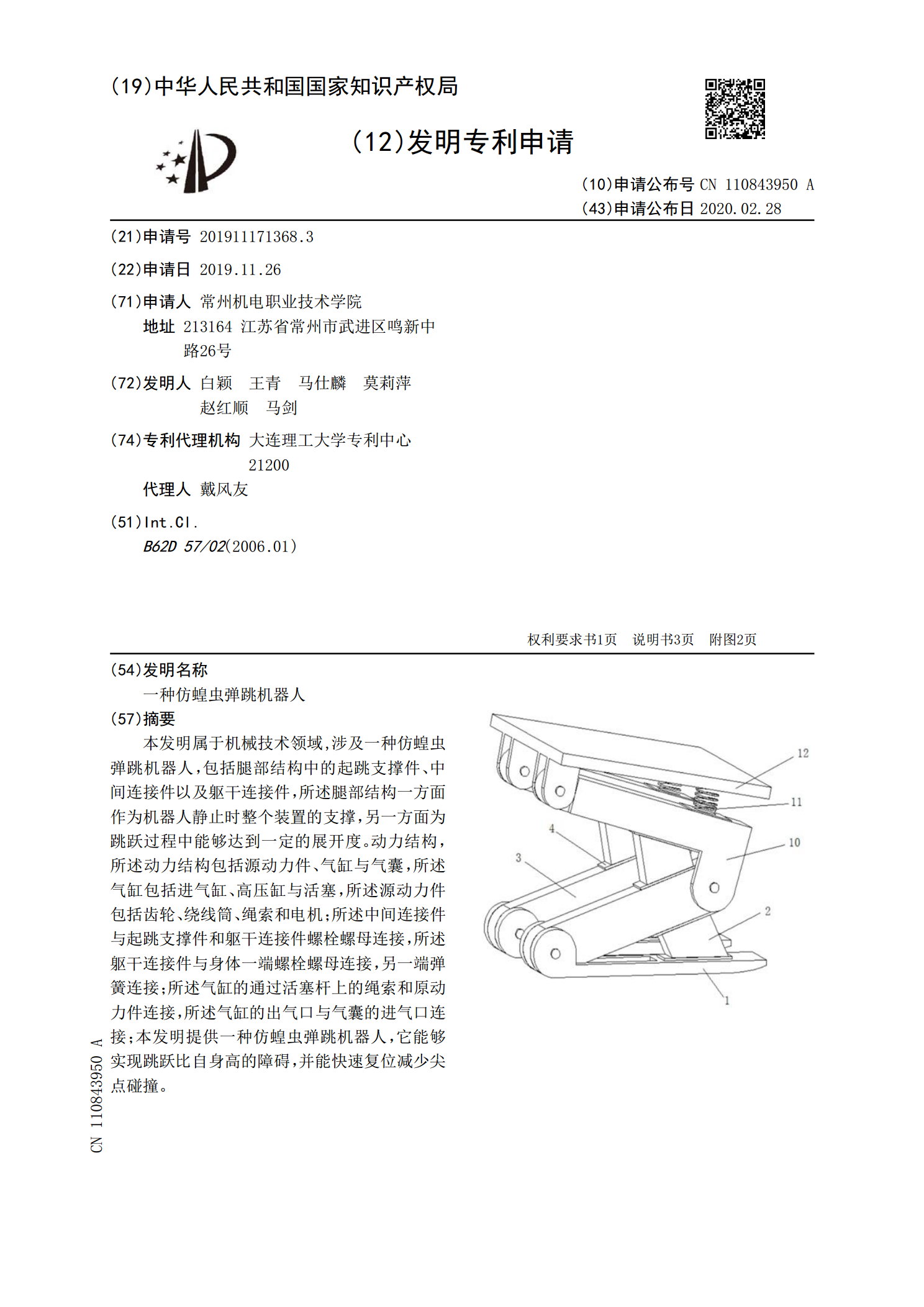
一种仿蝗虫弹跳机器人.pdf
本发明属于机械技术领域,涉及一种仿蝗虫弹跳机器人,包括腿部结构中的起跳支撑件、中间连接件以及躯干连接件,所述腿部结构一方面作为机器人静止时整个装置的支撑,另一方面为跳跃过程中能够达到一定的展开度。动力结构,所述动力结构包括源动力件、气缸与气囊,所述气缸包括进气缸、高压缸与活塞,所述源动力件包括齿轮、绕线筒、绳索和电机;所述中间连接件与起跳支撑件和躯干连接件螺栓螺母连接,所述躯干连接件与身体一端螺栓螺母连接,另一端弹簧连接;所述气缸的通过活塞杆上的绳索和原动力件连接,所述气缸的出气口与气囊的进气口连接;本发