
仿猎豹四足机器人结构设计与足端轨迹规划研究pptx.pptx

lj****88

1/8
2/8

3/8

4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿猎豹四足机器人结构设计与足端轨迹规划研究pptx.pptx
仿猎豹四足机器人结构设计与足端轨迹规划研究面向奔跑的四足机器人研究成为近年四足机器人研究的热点之一。刚性的四足机器人存在奔跑速度慢,运动稳定性和协调性不足等缺点。对四足机器人进行腿结构和脊椎的柔性设计可提高其运动性能。本文仿生动物猎豹,对面向奔跑的四足机器人进行了柔性结构设计和足端轨迹规划研究。主要内容如下:(1)基于对猎豹后腿骨骼-肌肉结构特性的分析,设计了具有缓冲性能的腿结构。通过对猎豹脊椎结构和在奔跑时脊椎形态变化的分析,设计了一种结构简单并能够实现上下弯曲的柔性脊椎结构。设计了以液压缸作为驱动机构
仿猎豹四足机器人结构设计与足端轨迹规划研究.pptx.pptx
仿猎豹四足机器人结构设计与足端轨迹规划研究面向奔跑的四足机器人研究成为近年四足机器人研究的热点之一。刚性的四足机器人存在奔跑速度慢,运动稳定性和协调性不足等缺点。对四足机器人进行腿结构和脊椎的柔性设计可提高其运动性能。本文仿生动物猎豹,对面向奔跑的四足机器人进行了柔性结构设计和足端轨迹规划研究。主要内容如下:(1)基于对猎豹后腿骨骼-肌肉结构特性的分析,设计了具有缓冲性能的腿结构。通过对猎豹脊椎结构和在奔跑时脊椎形态变化的分析,设计了一种结构简单并能够实现上下弯曲的柔性脊椎结构。设计了以液压缸作为驱动机构

四足机器人足端运动空间分析与轨迹规划.docx
四足机器人足端运动空间分析与轨迹规划四足机器人足端运动空间分析与轨迹规划摘要:四足机器人是一种具有广泛应用前景的机器人系统,其足端运动空间的分析和轨迹规划是实现该系统运动控制的关键问题。本文综述了四足机器人足端运动空间的分析方法和轨迹规划算法,并探讨了其存在的一些挑战和发展趋势。关键词:四足机器人,足端运动空间,轨迹规划,分析方法,挑战与发展1.引言四足机器人是一类仿生机器人,其构造模仿了生物动物的四肢结构,拥有优秀的行走和移动能力。为了实现四足机器人的运动控制,需要对其足端运动空间进行分析和轨迹规划。足
一种规划四足机器人足端摆动轨迹的方法.pdf
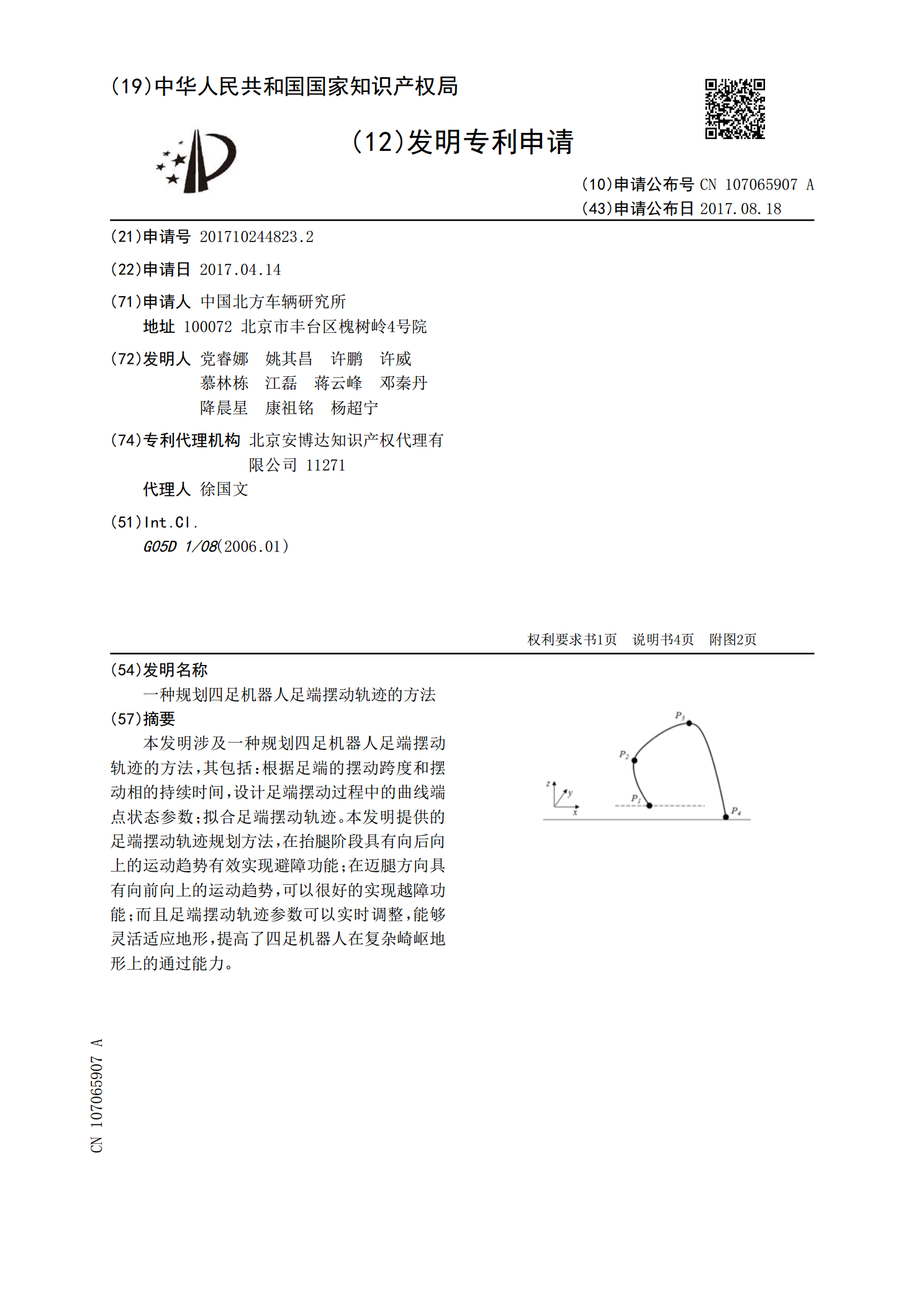
本发明涉及一种规划四足机器人足端摆动轨迹的方法,其包括:根据足端的摆动跨度和摆动相的持续时间,设计足端摆动过程中的曲线端点状态参数;拟合足端摆动轨迹。本发明提供的足端摆动轨迹规划方法,在抬腿阶段具有向后向上的运动趋势有效实现避障功能;在迈腿方向具有向前向上的运动趋势,可以很好的实现越障功能;而且足端摆动轨迹参数可以实时调整,能够灵活适应地形,提高了四足机器人在复杂崎岖地形上的通过能力。

关于四足机器人足端行走轨迹优化设计仿真.docx
关于四足机器人足端行走轨迹优化设计仿真引言:人类对机器人的需求在不断地增长,机器人技术已经广泛应用于各行各业,其中包括四足机器人。四足机器人在行走能力上比较优秀。尤其是在一些较为恶劣的环境中,如灾难现场、荒野、山地等无法机动的地区,四足机器人的使用效果更佳。为了提高四足机器人的行走能力,轨迹优化设计成为了研究的焦点。一、四足机器人轨迹优化设计概述1.1需要进行轨迹优化设计的原因在四足机器人的行走过程中,机器人四条腿的行动轨迹对于机器人的稳定性、机动性和速度影响很大。因此,在设计四足机器人的行走轨迹时,需要