
仿人多指灵巧手的抓取规划与实验pptx.pptx

lj****88

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仿人多指灵巧手的抓取规划与实验pptx.pptx
仿人多指灵巧手的抓取规划与实验仿人多指灵巧手作为智能机器人的一种末端执行器,具有独特的仿人机械结构和灵巧的操作性能,可完成对任意形状物体的抓取,为人类的生产生活提供诸多便利。而灵巧手因其较多的自由度和抓取模式的多样性,使得对目标物体的抓取规划变得非常复杂。为使指灵巧手能够在获取物体的形状顶点信息后成功抓取边形物体,本文提出一种抓取规划算法,该算法能够以最小的作用力实现对物体的抓取,防止物体损坏,同时还可以抵抗已知的外力干扰。论文的主要内容如下:以BarrettHand灵巧手为研究对象,基于D-H法建立其正
仿人多指灵巧手的抓取规划与实验.pptx.pptx
仿人多指灵巧手的抓取规划与实验仿人多指灵巧手作为智能机器人的一种末端执行器,具有独特的仿人机械结构和灵巧的操作性能,可完成对任意形状物体的抓取,为人类的生产生活提供诸多便利。而灵巧手因其较多的自由度和抓取模式的多样性,使得对目标物体的抓取规划变得非常复杂。为使指灵巧手能够在获取物体的形状顶点信息后成功抓取边形物体,本文提出一种抓取规划算法,该算法能够以最小的作用力实现对物体的抓取,防止物体损坏,同时还可以抵抗已知的外力干扰。论文的主要内容如下:以BarrettHand灵巧手为研究对象,基于D-H法建立其正

仿人多指手逆运动学及协同运动控制的研究pptx.pptx
仿人多指手逆运动学及协同运动控制的研究本文结合国家自然科学基金项目“仿人多指手的多维指尖力感知和同步控制”(课题编号51175106),对仿人多指手的逆运动学和协同运动控制展开了研究。多指手系统的整体性能取决于所有手指以及手指所有关节的协同性能,如果多指手协同性差,那么系统的整体性能就会降低。为解决上述问题,本文在提出具有耦合关节的手指逆运动学算法后,研究单手指各关节间的同步误差和指间同步控制方法,并把人手协同运动规律引入控制器的设计中,使得多指手达到协同运动的目的。本文首先针对具有耦合关节的手指,提出基
基于深度神经网络的多指灵巧手抓取手势规划方法.pdf
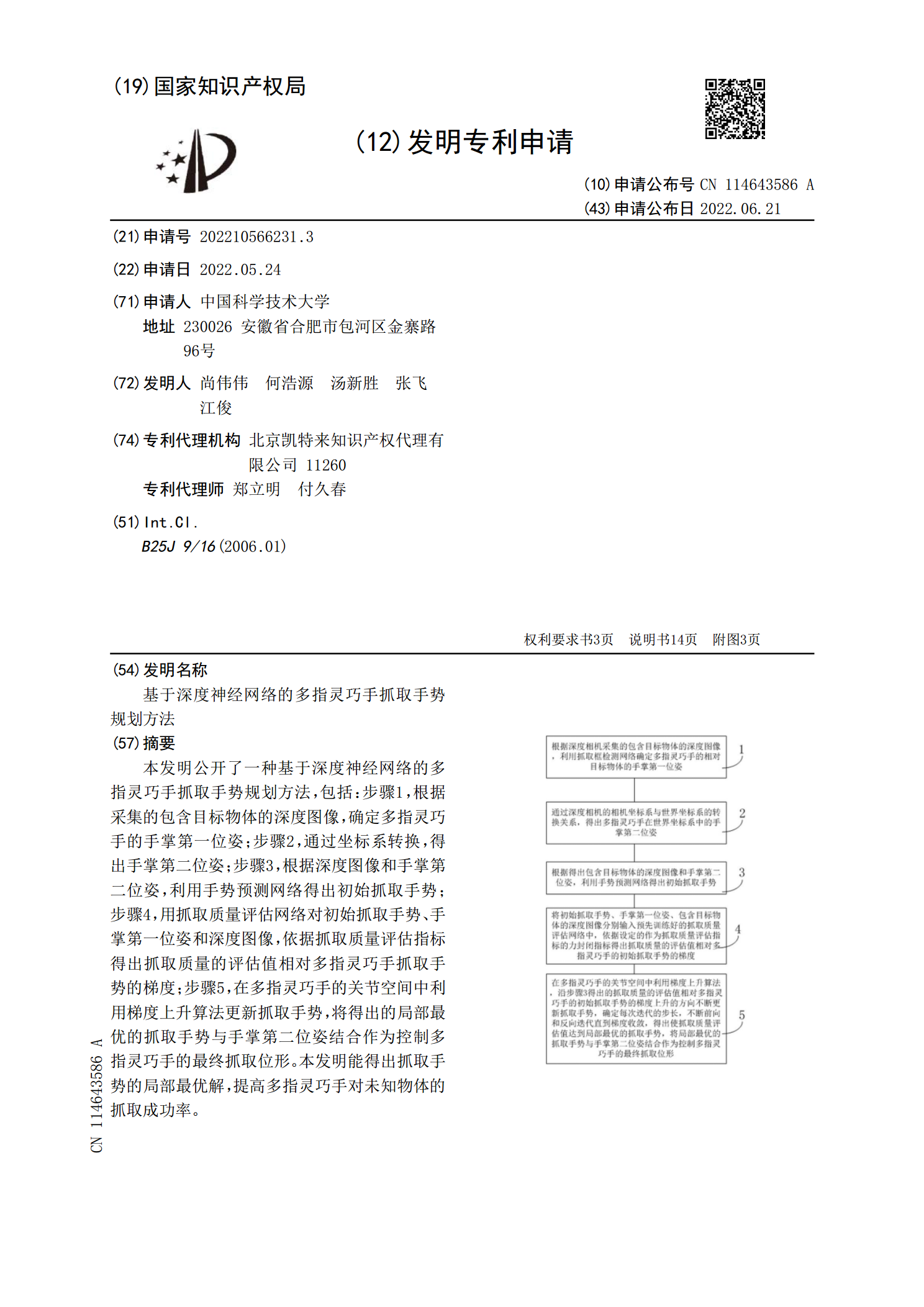
本发明公开了一种基于深度神经网络的多指灵巧手抓取手势规划方法,包括:步骤1,根据采集的包含目标物体的深度图像,确定多指灵巧手的手掌第一位姿;步骤2,通过坐标系转换,得出手掌第二位姿;步骤3,根据深度图像和手掌第二位姿,利用手势预测网络得出初始抓取手势;步骤4,用抓取质量评估网络对初始抓取手势、手掌第一位姿和深度图像,依据抓取质量评估指标得出抓取质量的评估值相对多指灵巧手抓取手势的梯度;步骤5,在多指灵巧手的关节空间中利用梯度上升算法更新抓取手势,将得出的局部最优的抓取手势与手掌第二位姿结合作为控制多指灵巧

机器人多指手抓取规划算法研究的任务书.docx
机器人多指手抓取规划算法研究的任务书任务书:一、任务背景随着机器人技术的不断发展,机器人已经可以在很多领域得到广泛应用,比如工业自动化、家庭服务、医疗护理等。其中,机器人的抓取能力对于工业自动化和服务机器人尤为重要。因此,机器人抓取规划算法的研究越来越受到人们的关注。机器人抓取规划算法是指机器人在执行抓取任务时,根据任务要求和环境条件,规划出合理的抓取路径和抓取姿态的算法。目前,这一领域已经有了较为成熟的研究成果,但仍然存在许多有待解决的问题,例如机器人与环境的交互、抓取姿态的优化等。二、任务目标本次任务