
峰值电流模式.ppt

lj****88

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
峰值电流模式.ppt
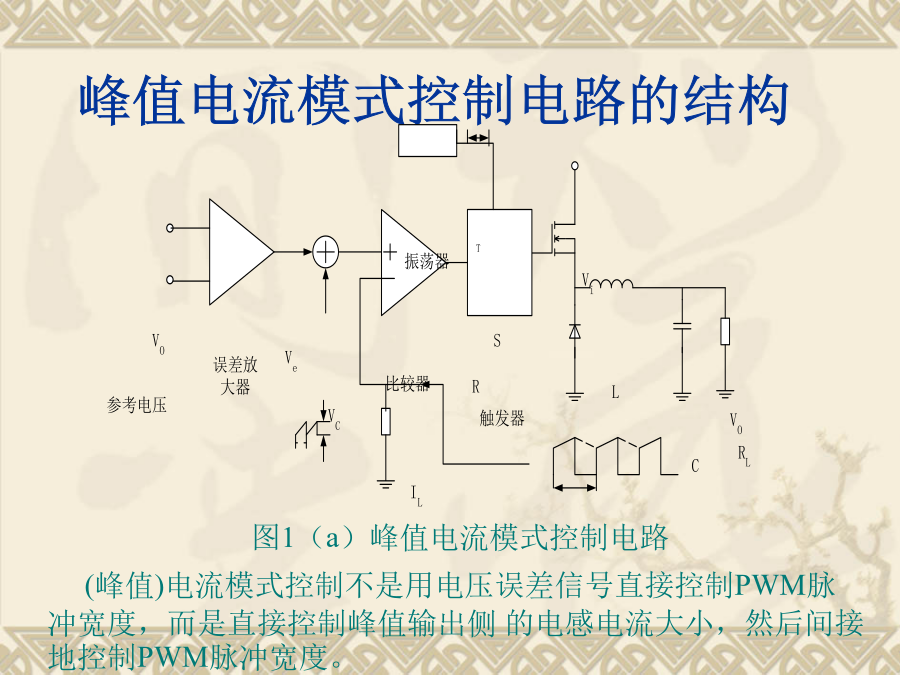
峰值电流模式控制电路设计峰值电流模式控制电路的结构t峰值电流模式PWM控制电路优点整个反馈电路变成了一阶电路。虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了
峰值电流模式.ppt
峰值电流模式控制电路设计峰值电流模式控制电路的结构t峰值电流模式PWM控制电路优点整个反馈电路变成了一阶电路。虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了
峰值电流模式.ppt
峰值电流模式控制电路设计峰值电流模式控制电路的结构t峰值电流模式PWM控制电路优点整个反馈电路变成了一阶电路。虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了

峰值电流模式.ppt
峰值电流模式控制电路设计峰值电流模式控制电路的结构t峰值电流模式PWM控制电路优点整个反馈电路变成了一阶电路。虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了

峰值电流模式-PPT.ppt
峰值电流模式控制电路设计峰值电流模式控制电路的结构t峰值电流模式PWM控制电路优点整个反馈电路变成了一阶电路。虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了