
姿控发动机成对推力偏差调试控制研究.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

姿控发动机成对推力偏差调试控制研究.docx
姿控发动机成对推力偏差调试控制研究摘要本文研究了姿控发动机成对推力偏差调试控制问题。在分析了成对推力偏差成因及对火箭姿态稳定性产生的影响后,提出了基于反馈控制的调试方法。针对常见的比例-积分控制器、模糊控制器和神经网络控制器,分别进行仿真和实验验证,并对三种方法进行了比较分析。结果表明,模糊控制器能够更好地调节姿控发动机成对推力偏差,实现姿态控制稳定和精确。关键词:姿控发动机;成对推力偏差;反馈控制;模糊控制器;姿态稳定性AbstractThispaperfocusesontheadjustmentand

姿控发动机矢量推力原位校准装置.pdf
本发明涉及姿控发动机矢量推力原位校准装置,包括标准矢量力力源、加载机构、矢量力测量单元、数据采集单元以及数据处理单元,标准矢量力力源用于根据执行要求产生并控制9个标准力作用在加载机构上;加载机构用于固定待校准的矢量力传感器;矢量力测量单元用于对待测矢量力传感器输出的电压信号的进行采集并存储至数据处理模块;数据处理模块用于接收来自标准矢量力力源的加载结果和矢量力测量单元的测量结果,并进行存储对,后通过计算获取待校准矢量力传感器的校准系数。姿控发动机矢量推力原位校准装置可在2Pa高模环境下远程自动校准,可有效

一种姿控发动机推力优化方法.docx
一种姿控发动机推力优化方法AbstractInthispaper,athrustoptimizationmethodforattitudecontrolenginesisproposed.Themethodaimstoimprovetheefficiencyoftheattitudecontrolsystembyoptimizingthethrustoftheenginesduringspacecraftmaneuvers.Thethrustoptimizationmethodisbasedontheop

姿控火箭发动机推力测试系统温度影响研究的开题报告.docx
姿控火箭发动机推力测试系统温度影响研究的开题报告摘要:随着火箭技术的不断发展,姿控火箭发动机成为了航天领域中不可或缺的部分。在姿控火箭发动机推力测试过程中,温度的影响是不可避免的,因此研究火箭发动机推力测试系统温度的影响是非常必要的。本文旨在研究姿控火箭发动机推力测试系统中温度对发动机推力的影响及其机理,并提出相应的解决方案,以确保测试结果的准确性和可靠性。关键词:姿控火箭发动机,推力测试系统,温度影响,解决方案一、研究背景和意义随着现代航空、航天技术的迅速发展,姿控火箭发动机在军事、民用甚至商业领域中得
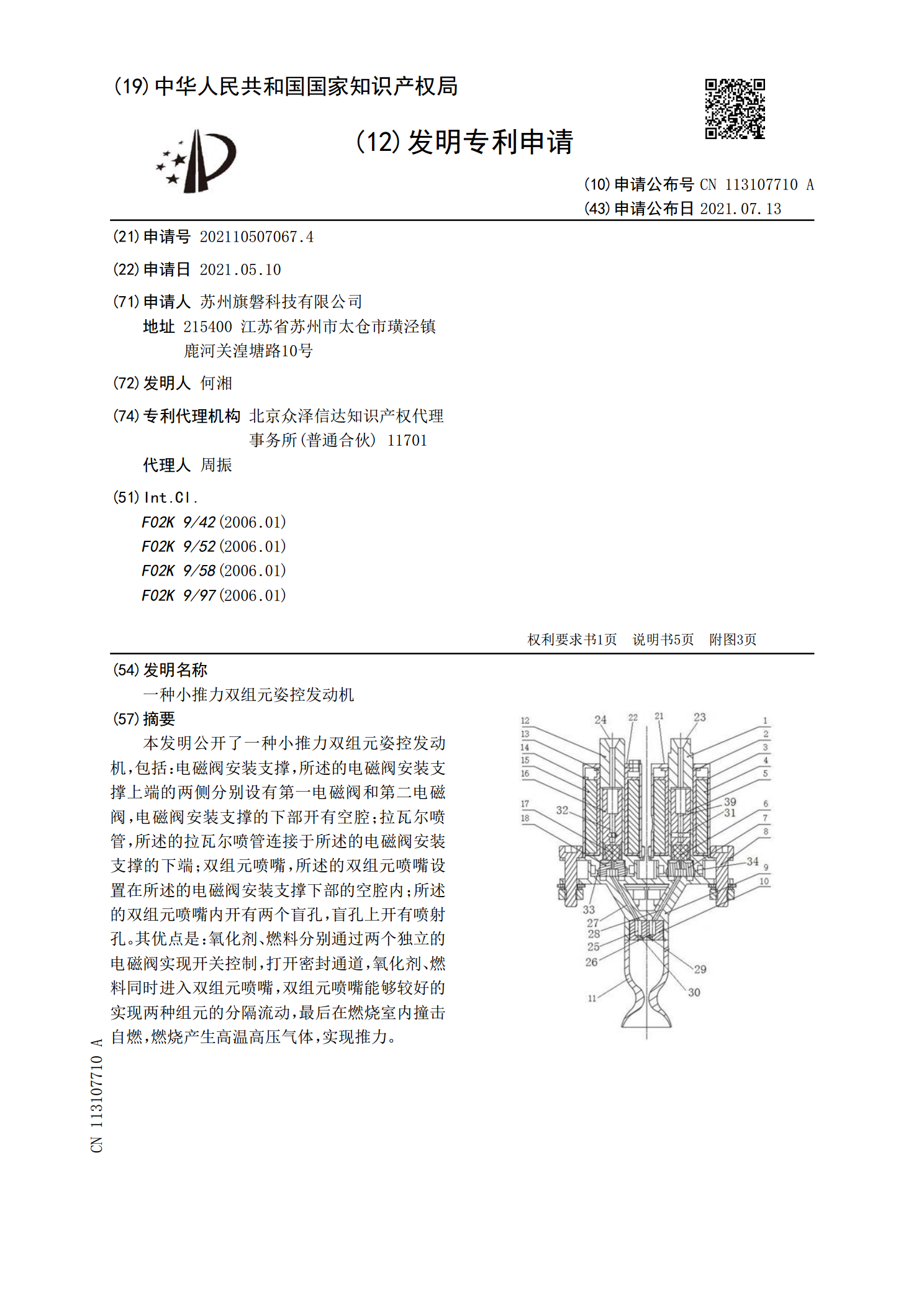
一种小推力双组元姿控发动机.pdf
本发明公开了一种小推力双组元姿控发动机,包括:电磁阀安装支撑,所述的电磁阀安装支撑上端的两侧分别设有第一电磁阀和第二电磁阀,电磁阀安装支撑的下部开有空腔;拉瓦尔喷管,所述的拉瓦尔喷管连接于所述的电磁阀安装支撑的下端;双组元喷嘴,所述的双组元喷嘴设置在所述的电磁阀安装支撑下部的空腔内;所述的双组元喷嘴内开有两个盲孔,盲孔上开有喷射孔。其优点是:氧化剂、燃料分别通过两个独立的电磁阀实现开关控制,打开密封通道,氧化剂、燃料同时进入双组元喷嘴,双组元喷嘴能够较好的实现两种组元的分隔流动,最后在燃烧室内撞击自燃,燃