
基于模方迭代算法的惯组参数辨识研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于模方迭代算法的惯组参数辨识研究.docx
基于模方迭代算法的惯组参数辨识研究摘要:惯组参数辨识是惯性导航系统关键技术之一,为了提高惯导系统测量精度,本研究采用模方迭代算法进行惯组参数辨识。首先介绍模方迭代算法的原理,然后介绍基于模方迭代算法进行惯组参数辨识的具体步骤,并通过仿真实验验证该方法的有效性。实验结果表明,该方法能够准确地辨识出惯组参数,提高了惯导系统的测量精度。关键词:惯性导航系统;惯组参数辨识;模方迭代算法一、引言惯性导航系统是现代导航领域中应用广泛的理想导航系统,不受外部环境干扰,具有高精度、高可靠性、高稳定性等优点。惯性导航系统的

基于参数辨识原理的飞机参数分析及算法研究.docx
基于参数辨识原理的飞机参数分析及算法研究摘要:本论文基于参数辨识原理,对飞机的一些重要参数进行了分析和研究,建立了相应的算法模型。主要研究了飞机的质量、惯性、稳定性和控制特性等方面的参数,并通过数值模拟和实验验证进行了可靠性验证。通过本论文的研究,为飞机设计与控制提供了重要的参考价值。1.引言飞机是人类创造的最伟大的机器之一,其设计和控制涉及到众多的参数和复杂的系统。而飞机参数的准确分析和测量是保证飞机性能和安全的关键环节。参数辨识原理是一种通过对系统输入输出特性的分析来确定系统参数的方法。本文基于此原理
基于梯度迭代算法的分数阶流体控制阀系统参数辨识方法.pdf
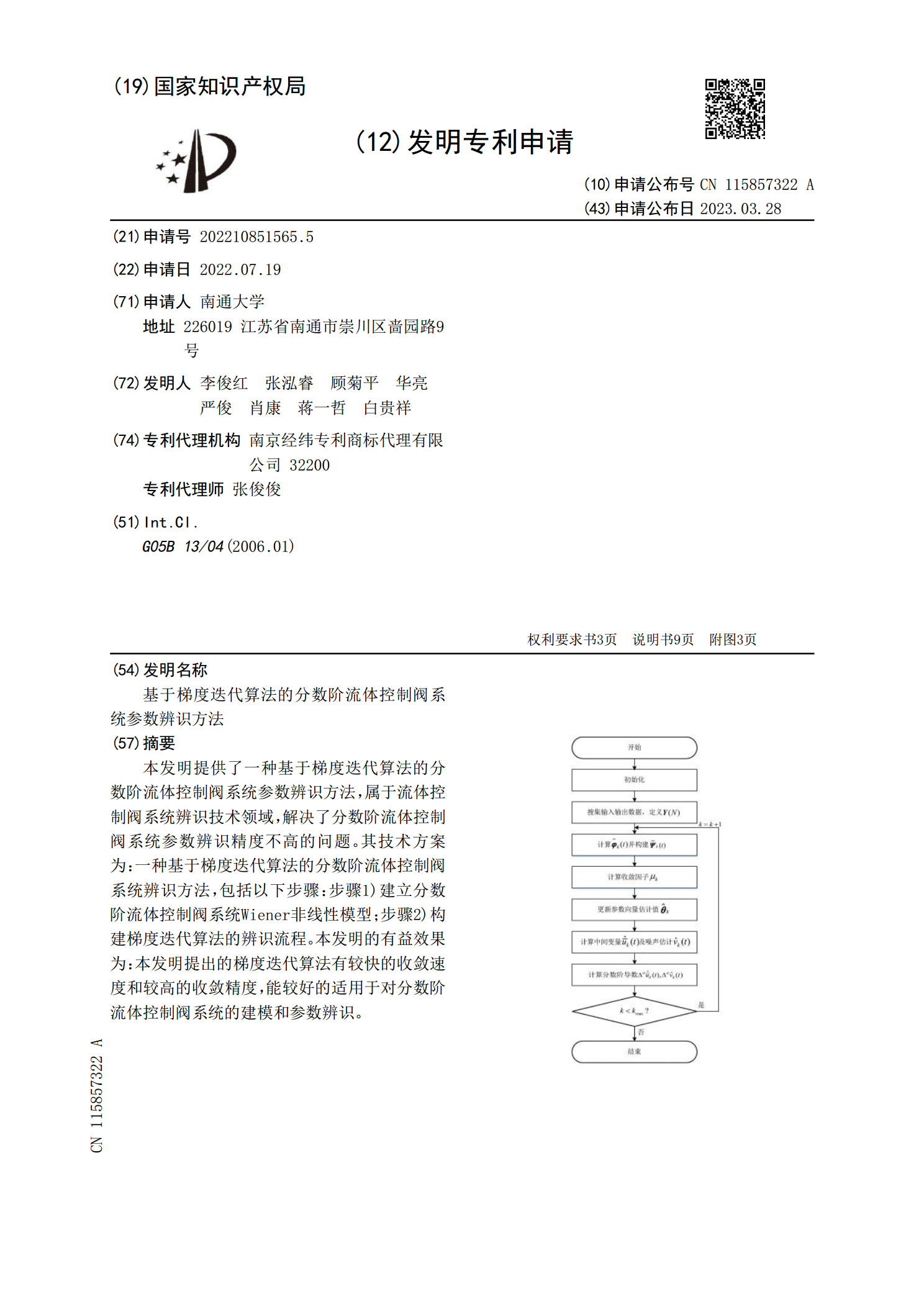
本发明提供了一种基于梯度迭代算法的分数阶流体控制阀系统参数辨识方法,属于流体控制阀系统辨识技术领域,解决了分数阶流体控制阀系统参数辨识精度不高的问题。其技术方案为:一种基于梯度迭代算法的分数阶流体控制阀系统辨识方法,包括以下步骤:步骤1)建立分数阶流体控制阀系统Wiener非线性模型;步骤2)构建梯度迭代算法的辨识流程。本发明的有益效果为:本发明提出的梯度迭代算法有较快的收敛速度和较高的收敛精度,能较好的适用于对分数阶流体控制阀系统的建模和参数辨识。

基于粒子群算法的风电场参数辨识研究.docx
基于粒子群算法的风电场参数辨识研究摘要本篇论文介绍了基于粒子群算法的风电场参数辨识研究。针对风电场中的参数辨识问题,本文运用了粒子群算法对其进行求解,有效提升了辨识的精度和效率。在对实际风电场数据的模拟实验中,本文得到了较为准确的参数估计和预测结果,验证了算法的可靠性和实用性。本文的研究对于改善风电场的设计和运行具有一定的实际应用价值。关键词:风电场,参数辨识,粒子群算法,预测1.引言随着全球能源危机的加剧和环保意识的增强,风能作为一种新型的清洁能源逐渐得到人们的重视和广泛应用。风力发电机是风电场的核心部

基于遗传算法的摩擦模型参数辨识研究.docx
基于遗传算法的摩擦模型参数辨识研究摘要本文基于遗传算法,研究了摩擦模型参数辨识的方法。首先介绍了遗传算法的基本原理,然后分析了摩擦模型参数辨识的重要性及其应用场景,接着提出了用遗传算法求解摩擦模型参数的思路,并进行了实验验证。实验结果表明,遗传算法能够有效地辨识出模型参数,并且在求解复杂问题方面具有很好的适用性。关键词:遗传算法;摩擦模型;参数辨识AbstractThispaperstudiesthemethodoffrictionmodelparameteridentificationbasedonge