
基于机器人技术的鱼雷罐车插头自动插拔系统.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于机器人技术的鱼雷罐车插头自动插拔系统.docx
基于机器人技术的鱼雷罐车插头自动插拔系统摘要随着机器人技术的发展,机械设备自动化已经成为了一个重要的发展趋势。本文介绍了一种基于机器人技术的鱼雷罐车插头自动插拔系统方案,该系统主要通过机器人的操控和智能控制来实现对罐车插头的自动插拔,提高了作业效率和安全性。本文主要介绍该系统的结构、工作原理和优势,并对其未来的发展方向进行了探讨。关键词:机器人技术,自动化,鱼雷罐车,插头自动插拔,智能控制引言鱼雷罐车是工业生产中常用的运输工具之一,其使用时需要对罐体中的物质进行填充和卸载。而鱼雷罐车的卸载则需要进行插头接

基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统研究.docx
基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统研究标题:基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统研究摘要:近年来,随着物流行业的快速发展,鱼雷罐车在石油和化工等领域的运输中起到了至关重要的作用。然而,鱼雷罐车的安全性和定位跟踪问题一直存在。本文针对这一问题,通过结合差分全球定位系统(DGPS)和电子感应技术,设计了一种新型的鱼雷罐车定位跟踪系统。实验结果表明,该系统能够实现对鱼雷罐车的准确定位和实时跟踪,提高了鱼雷罐车的安全性和运输效率。关键词:鱼雷罐车;定位跟踪;差分全球定位系统;电子感应技术
一种鱼雷罐接电装置自动插拔方法.pdf
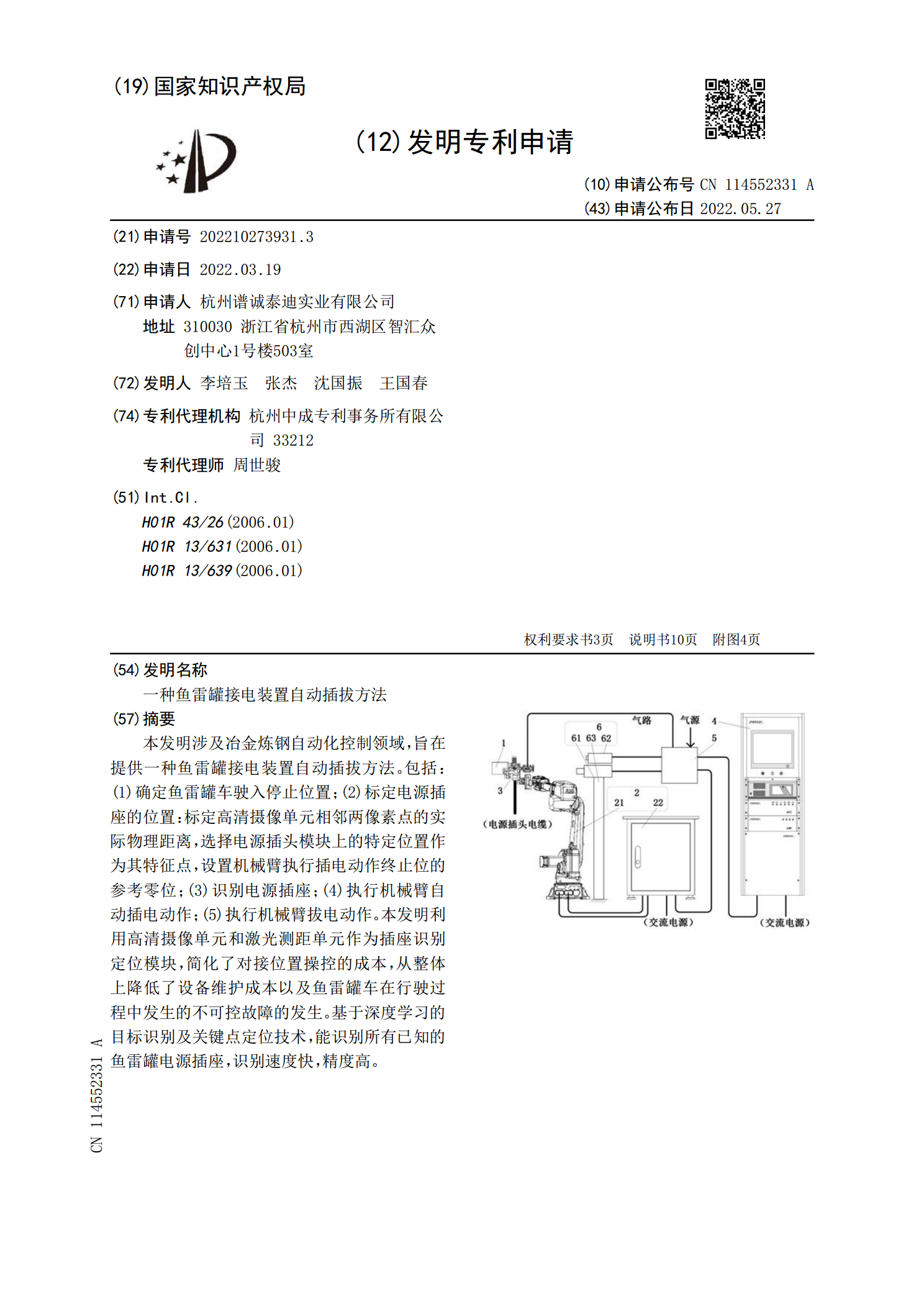
本发明涉及冶金炼钢自动化控制领域,旨在提供一种鱼雷罐接电装置自动插拔方法。包括:(1)确定鱼雷罐车驶入停止位置;(2)标定电源插座的位置:标定高清摄像单元相邻两像素点的实际物理距离,选择电源插头模块上的特定位置作为其特征点,设置机械臂执行插电动作终止位的参考零位;(3)识别电源插座;(4)执行机械臂自动插电动作;(5)执行机械臂拔电动作。本发明利用高清摄像单元和激光测距单元作为插座识别定位模块,简化了对接位置操控的成本,从整体上降低了设备维护成本以及鱼雷罐车在行驶过程中发生的不可控故障的发生。基于深度学习

基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统研究的任务书.docx
基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统研究的任务书1.研究背景鱼雷罐车是一种运输液态氨和液化石油气等危险品的特种化工货车,其运输安全一直是工业企业和相关部门关注的问题。为了确保鱼雷罐车的安全运输,研究开发一种基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统具有重要的现实意义。2.研究目的本研究旨在开发一种基于DGPS和电子感应技术的鱼雷罐车定位跟踪系统,减少鱼雷罐车运输过程中的安全风险,提高工业企业在危化品运输领域的管理水平,促进经济的发展。3.研究内容(1)系统需求分析与设计:分析鱼雷罐车定位
一种鱼雷罐车电能供应系统.pdf
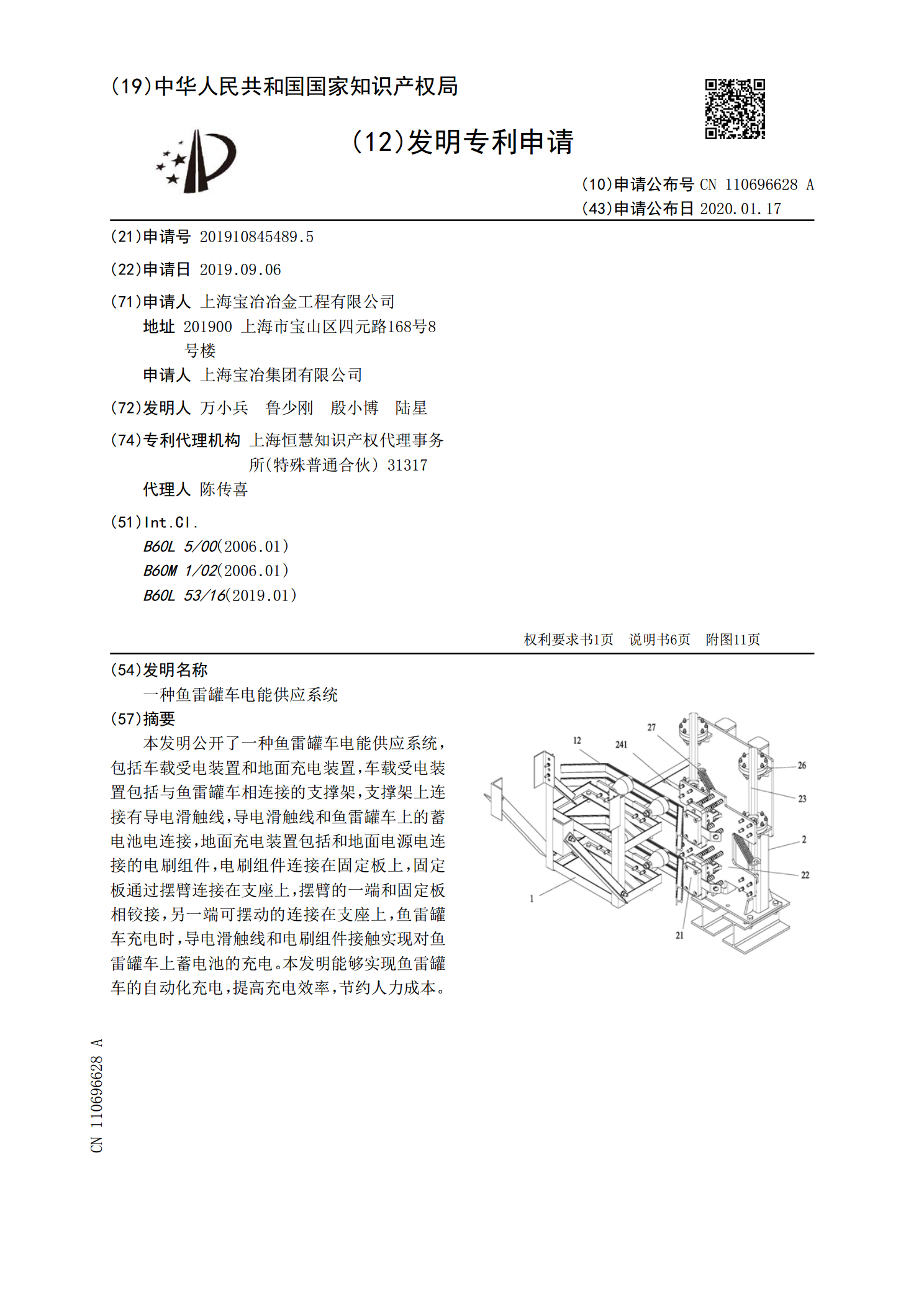
本发明公开了一种鱼雷罐车电能供应系统,包括车载受电装置和地面充电装置,车载受电装置包括与鱼雷罐车相连接的支撑架,支撑架上连接有导电滑触线,导电滑触线和鱼雷罐车上的蓄电池电连接,地面充电装置包括和地面电源电连接的电刷组件,电刷组件连接在固定板上,固定板通过摆臂连接在支座上,摆臂的一端和固定板相铰接,另一端可摆动的连接在支座上,鱼雷罐车充电时,导电滑触线和电刷组件接触实现对鱼雷罐车上蓄电池的充电。本发明能够实现鱼雷罐车的自动化充电,提高充电效率,节约人力成本。