
基于视觉神经元PID的AGV轨迹跟踪控制器.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉神经元PID的AGV轨迹跟踪控制器.docx
基于视觉神经元PID的AGV轨迹跟踪控制器本文主要介绍基于视觉神经元PID的AGV轨迹跟踪控制器。首先,将会讲述AGV及其轨迹跟踪控制的背景和意义。接着,介绍控制器的一般工作原理和控制器的设计思路。然后,将详细说明控制器的设计流程与实现方法。最后,利用仿真实验验证控制器的效果,并总结控制器的优缺点。一、背景和意义AGV,即自动引导车,是一种能够在制造业、物流、医药和军事等领域中,自主移动、搬运或运送物品的无人驾驶车辆。它可以通过激光雷达、红外线、摄像头等传感器来感知周围环境,并利用电子地图和SLAM技术进

基于改进模糊PID的AGV轨迹跟踪研究.docx
基于改进模糊PID的AGV轨迹跟踪研究基于改进模糊PID的AGV轨迹跟踪研究摘要:AGV(自动导引车)作为一种重要的物流设备,在工业生产和物流管理中扮演着重要角色。AGV的轨迹跟踪问题是保证AGV运动精度和稳定性的核心问题之一。本文提出了一种基于改进模糊PID的AGV轨迹跟踪方法,通过对AGV系统动力学的建模和参数调节,实现了轨迹跟踪的稳定性和精确性。关键词:AGV,轨迹跟踪,模糊PID,稳定性,精确性1.引言随着自动化技术的不断发展,AGV作为一种自动导引车,广泛应用于工业生产和物流配送领域。AGV的核
基于AGV系统的轨迹跟踪控制方法.pdf
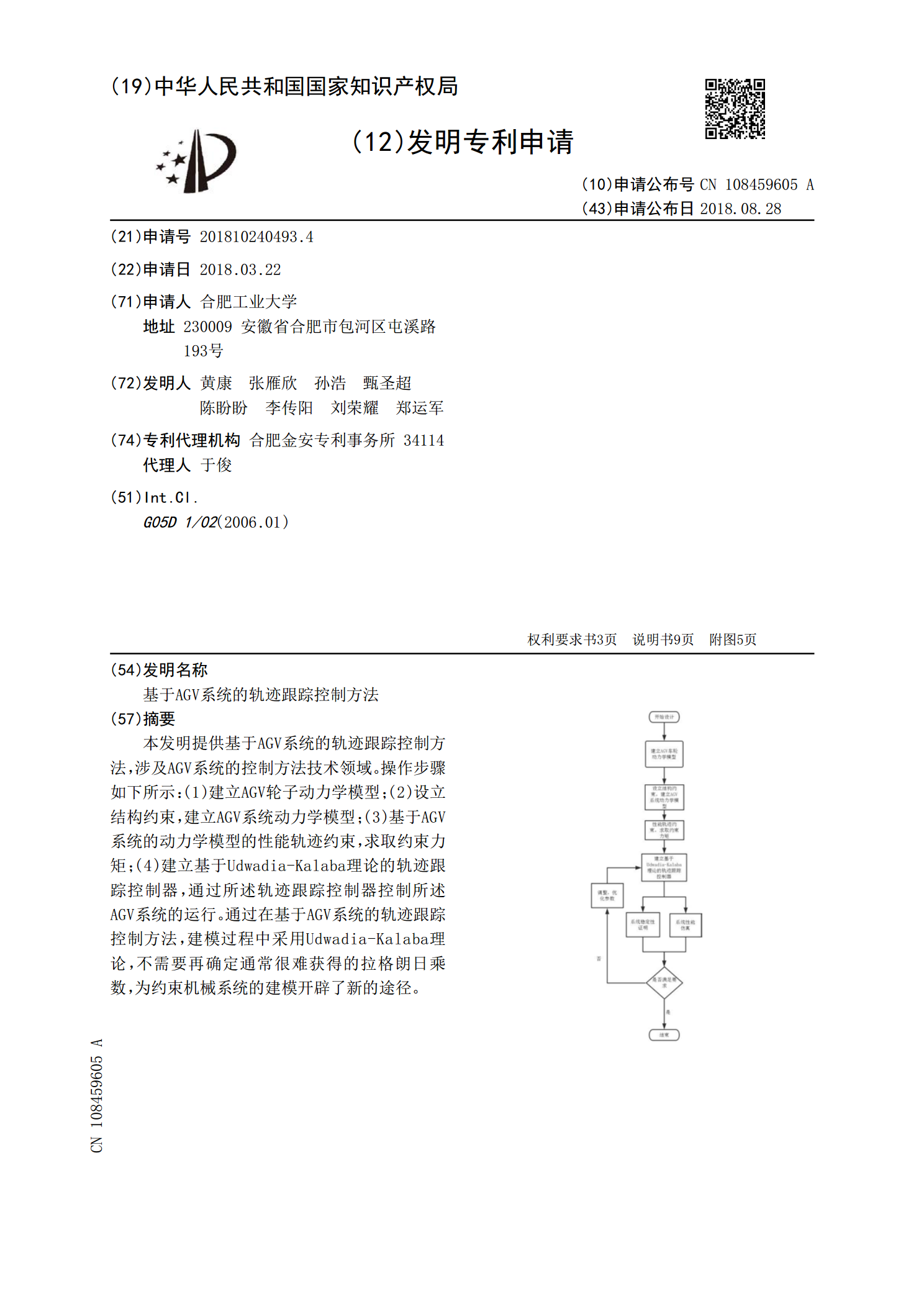
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径

基于神经元的PID学习控制器.docx
基于神经元的PID学习控制器基于神经元的PID学习控制器摘要:PID(比例-积分-微分)控制器是一种经典的控制算法,被广泛应用于工业自动化系统中。然而,传统的PID控制器的参数通常需要手动调整,不利于控制器应对系统动态变化的需求。为了解决这个问题,近年来,基于神经元的PID学习控制器逐渐引起了研究者的关注。本文将介绍基于神经元的PID学习控制器的原理、方法和应用,并对其优点与局限性进行探讨。1.引言PID控制器是一种经典的反馈控制算法,通过比例、积分和微分三个控制参数来调节系统的输出,使系统的输出与期望输

基于彩色轨迹引导的AGV视觉导航方案研究.docx
基于彩色轨迹引导的AGV视觉导航方案研究基于彩色轨迹引导的AGV视觉导航方案研究摘要:自动导引车辆(AGV)被广泛应用于工业自动化领域,实现产品在生产线上的自动运输。AGV的视觉导航是其关键技术之一,通过识别并跟踪运输路径上的轨迹,实现准确的导航控制。本文基于彩色轨迹引导,提出了一种AGV视觉导航方案,通过研究颜色识别、轨迹跟踪和导航控制等关键技术,实现了对AGV的精确定位与导航。关键词:AGV;视觉导航;彩色轨迹;颜色识别;轨迹跟踪;导航控制一、引言AGV是一种能够自主移动和运输物品的无人驾驶车辆,广泛