
基于机器视觉与单片机结合的机械臂抓取系统.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于机器视觉与单片机结合的机械臂抓取系统.docx
基于机器视觉与单片机结合的机械臂抓取系统一、引言机器人技术的快速发展,已经成为了智能制造的重要组成部分,不仅在生产中得到了广泛应用,也成为了未来高新技术的研究热点。而机械臂作为机器人的一种典型形式,具有灵活、高效等特性,对人力的劳动力的替换,以及提高制造效率、降低成本等方面都有着很大的应用前景。本文将结合机器视觉和单片机技术,探讨机械臂抓取系统的设计和实现。二、背景机械臂抓取系统是机器人应用中常见和重要的一类应用。在工业中,机械臂抓取系统可以用于装配、搬运、分拣、包装等领域。而机械臂抓取系统的关键技术在于

基于机器视觉的机械臂智能抓取系统设计.docx
基于机器视觉的机械臂智能抓取系统设计【摘要】机器视觉技术在机械臂智能抓取系统中发挥着重要作用,本文针对机器视觉技术在机械臂抓取中的应用进行了深入研究。首先介绍了机械臂抓取系统的概念及其重要性,然后详细分析了机器视觉技术在机械臂抓取中的作用和优势,最后提出了一个基于机器视觉的机械臂智能抓取系统设计方案,并对该方案的可行性进行了分析和评估。通过本研究,可以提高机械臂抓取的准确性和效率,为机器人应用领域带来更多的发展机会。【关键词】机器视觉;机械臂;智能抓取;系统设计【引言】机器视觉技术是计算机科学与工程学领域

基于视觉引导的机械臂抓取系统研究.docx
基于视觉引导的机械臂抓取系统研究基于视觉引导的机械臂抓取系统研究摘要:近年来,随着机器视觉技术的不断发展和应用需求的增加,视觉引导的机械臂抓取系统逐渐成为研究的热点。本文以视觉引导的机械臂抓取系统为研究对象,结合现有技术和方法进行综述和分析,并提出了一种基于视觉引导的机械臂抓取系统的实现方案。研究结果表明,基于视觉引导的机械臂抓取系统具有较高的准确性和灵活性,可以广泛应用于制造业、仓储物流、医疗等领域,并具有很大的研究和应用价值。关键词:机械臂;抓取系统;视觉引导;准确性;灵活性1.引言机械臂是一种能够模
一种基于机器视觉的移动机械臂抓取控制系统及方法.pdf
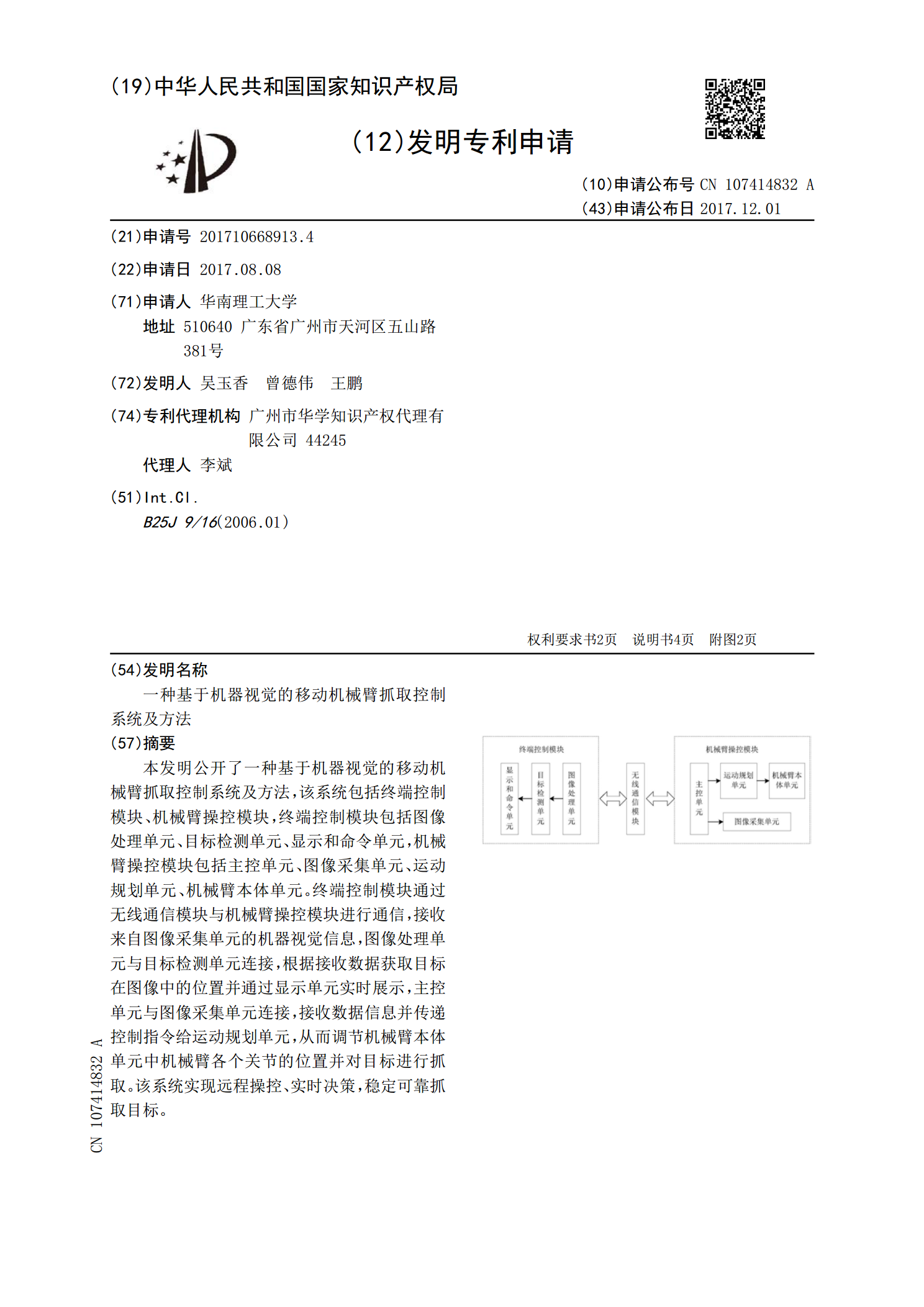
本发明公开了一种基于机器视觉的移动机械臂抓取控制系统及方法,该系统包括终端控制模块、机械臂操控模块,终端控制模块包括图像处理单元、目标检测单元、显示和命令单元,机械臂操控模块包括主控单元、图像采集单元、运动规划单元、机械臂本体单元。终端控制模块通过无线通信模块与机械臂操控模块进行通信,接收来自图像采集单元的机器视觉信息,图像处理单元与目标检测单元连接,根据接收数据获取目标在图像中的位置并通过显示单元实时展示,主控单元与图像采集单元连接,接收数据信息并传递控制指令给运动规划单元,从而调节机械臂本体单元中机械

基于机器视觉的机械臂智能分拣系统.docx
基于机器视觉的机械臂智能分拣系统基于机器视觉的机械臂智能分拣系统摘要:随着全球物流行业的不断发展,分拣系统的自动化水平和准确性对于提高物流效率和降低成本变得越来越重要。机械臂在物流分拣中起到了重要的作用,但是传统的机械臂在适应性和准确性方面存在一些局限性。为了解决这个问题,本论文提出了一种基于机器视觉的机械臂智能分拣系统。该系统通过使用机器视觉算法识别和定位包裹,并通过机械臂进行高效准确的分拣操作。实验结果表明,该系统具有较高的准确性和效率,能够满足分拣系统的要求。关键词:机器视觉、机械臂、分拣系统、准确