
基于深度强化学习的无人机区域覆盖路径规划研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于深度强化学习的无人机区域覆盖路径规划研究.docx
基于深度强化学习的无人机区域覆盖路径规划研究摘要:无人机技术的发展使得无人机在许多应用领域得到了广泛的应用,如农业、测绘、安防等。其中,无人机区域覆盖任务是一种重要的任务,它可以帮助提高地面目标的监测、搜索和测量等工作的效率和质量。本文将使用深度强化学习技术来处理该任务,提出了一种基于深度强化学习的无人机区域覆盖路径规划算法,通过仿真实验证明了该算法的有效性和实用性。1.引言无人机在农业、测绘、安防等领域都有广泛应用,无人机区域覆盖任务是其中的一个重要任务。无人机在该任务中需要覆盖一个区域,目的是为了监测

物联网中基于深度强化学习的无人机路径规划.docx
物联网中基于深度强化学习的无人机路径规划基于深度强化学习的无人机路径规划摘要:随着物联网技术的不断发展,无人机的应用越来越广泛。无人机路径规划是无人机应用中的重要研究方向之一。针对无人机路径规划问题,在当前深度学习技术的基础上引入深度强化学习方法,可以提高无人机路径规划的效率和准确性。本论文主要探讨了基于深度强化学习的无人机路径规划的相关技术,包括深度强化学习的原理、无人机路径规划的问题描述与需求分析、深度强化学习在无人机路径规划中的应用等。通过实验结果的分析和讨论,验证了基于深度强化学习的无人机路径规划

物联网中基于深度强化学习的无人机路径规划的开题报告.docx
物联网中基于深度强化学习的无人机路径规划的开题报告一、选题背景随着物联网技术的不断发展和普及,无人机应用也越来越广泛。无人机的使用场景包括但不限于农业植保、安防巡视、物流配送、电力巡检等等。在这些场景中,无人机的路径规划成为了一个必须解决的问题。传统的无人机路径规划方法主要是基于图像识别和位置追踪等技术,虽然能够解决一些问题,但是仍然存在许多局限性,例如受天气影响、无法应对复杂场景等等。因此,本文将探讨一种基于深度强化学习的无人机路径规划方法,旨在进一步提高路径规划的效率和精度,以便更好地适应各种复杂场景

基于深度强化学习的无人机基站布局与追踪覆盖研究的任务书.docx
基于深度强化学习的无人机基站布局与追踪覆盖研究的任务书任务书一、任务背景和意义无人机技术的发展为众多领域的改进提供了可能,其中无人机通信系统的研究已被广泛关注。由于无人机在高空具有广泛的使用能力,同时无人机网络拓扑结构具备良好的灵活性和可扩展性,使之成为新一代移动通信网络的重要组成部分之一。无人机的部署能够有效地减少和消除地面行业的通信盲区,提高通信带宽,增强网络鲁棒性和可靠性。因此,针对无人机网络的研究成为了当前无人机技术的热点之一。在无人机网络中,基站是无人机通信的重要设备之一。合理的基站布局能够有效
基于分层强化学习的无人机路径规划方法.pdf
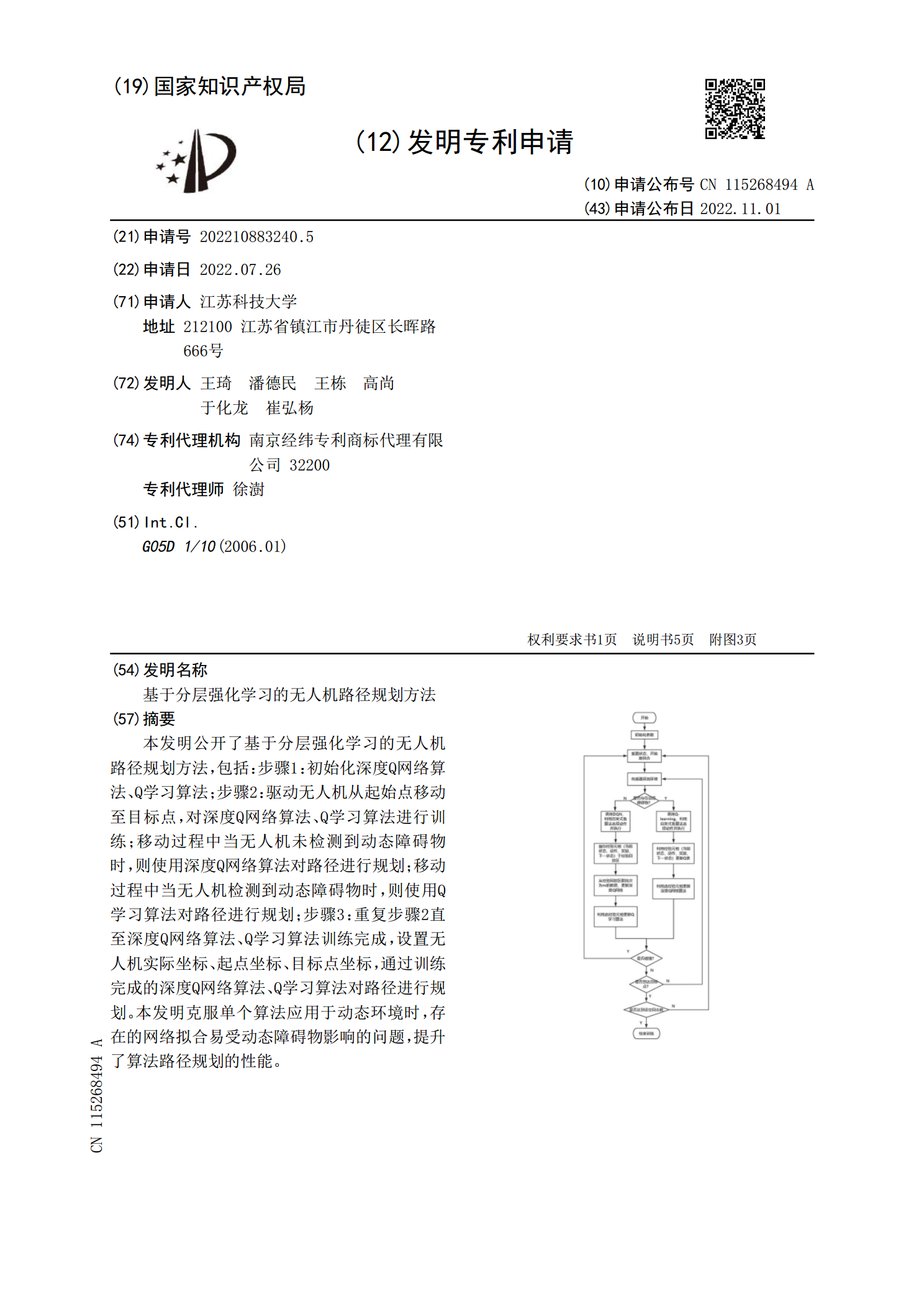
本发明公开了基于分层强化学习的无人机路径规划方法,包括:步骤1:初始化深度Q网络算法、Q学习算法;步骤2:驱动无人机从起始点移动至目标点,对深度Q网络算法、Q学习算法进行训练;移动过程中当无人机未检测到动态障碍物时,则使用深度Q网络算法对路径进行规划;移动过程中当无人机检测到动态障碍物时,则使用Q学习算法对路径进行规划;步骤3:重复步骤2直至深度Q网络算法、Q学习算法训练完成,设置无人机实际坐标、起点坐标、目标点坐标,通过训练完成的深度Q网络算法、Q学习算法对路径进行规划。本发明克服单个算法应用于动态环境