
基于BP神经网络的吊装吊耳位置识别方法研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于BP神经网络的吊装吊耳位置识别方法研究.docx
基于BP神经网络的吊装吊耳位置识别方法研究摘要:吊装吊耳是海上平台等大型设备吊装的重要部件。针对吊装过程中吊耳位置不明确的问题,本文提出了一种基于BP神经网络的吊装吊耳位置识别方法。该方法将吊耳图片进行灰度化,二值化和形态学处理,提取特征值,并通过BP神经网络对吊耳位置进行识别。实验结果表明,该方法能够有效地识别吊装吊耳的位置,并具有良好的鲁棒性和实用性。关键词:吊装吊耳;BP神经网络;特征提取;位置识别1.引言海上平台等大型设备的吊装作业通常需要使用吊耳进行吊装。吊耳的位置常常不明确,这给吊装工作带来很

基于BP神经网络的铆接位置识别方法设计.docx
基于BP神经网络的铆接位置识别方法设计摘要铆接作为一种常用的连接方式,在汽车工业和航空工业等领域占有重要地位。如何确定铆接位置的准确度,对于保证产品质量和生产效率至关重要。本文提出了一种基于BP神经网络的铆接位置识别方法。该方法将图像处理和神经网络技术有机结合,在实现高精度的铆接位置识别的同时也降低了人工干预的成本。文中详细介绍多层BP神经网络的结构与训练方法,并通过实验验证了该方法的可行性和有效性。关键词:铆接位置识别;BP神经网络;图像处理引言铆接是一种常用的连接方式,在汽车工业和航空工业等领域都有广
基于BP神经网络的车牌识别方法研究.pptx
汇报人:CONTENTS添加章节标题BP神经网络的基本原理神经网络的基本概念BP神经网络的学习过程神经网络的训练和优化车牌识别的技术背景车牌识别的重要性车牌识别的常见方法基于BP神经网络的车牌识别方法的优势基于BP神经网络的车牌识别方法设计数据预处理特征提取神经网络模型构建训练和测试过程实验结果与分析实验数据集介绍实验结果展示结果分析与其他方法的比较结论与展望基于BP神经网络的车牌识别方法的有效性在实际应用中的潜在价值未来研究方向汇报人:

基于BP神经网络进行云相态识别方法的研究.docx
基于BP神经网络进行云相态识别方法的研究随着云计算技术的普及和不断发展,云相态识别成为了云计算安全领域的重要研究课题。云相态是指在云环境下,虚拟机(VM)的状态,包括VM的资源配置、运行状态和行为等方面的表现。由于云计算具有大规模、高并发、高度动态等特点,传统的安全防御手段往往难以应对这些复杂的威胁,因此通过对云相态进行分析和识别,对云安全进行有效防御。本文将介绍一种基于BP神经网络进行云相态识别的方法。1.研究背景传统的安全防御手段主要通过黑白名单、防火墙、入侵检测等技术对云环境进行安全保护。但是,这些
基于BP神经网络的手势识别方法.pdf
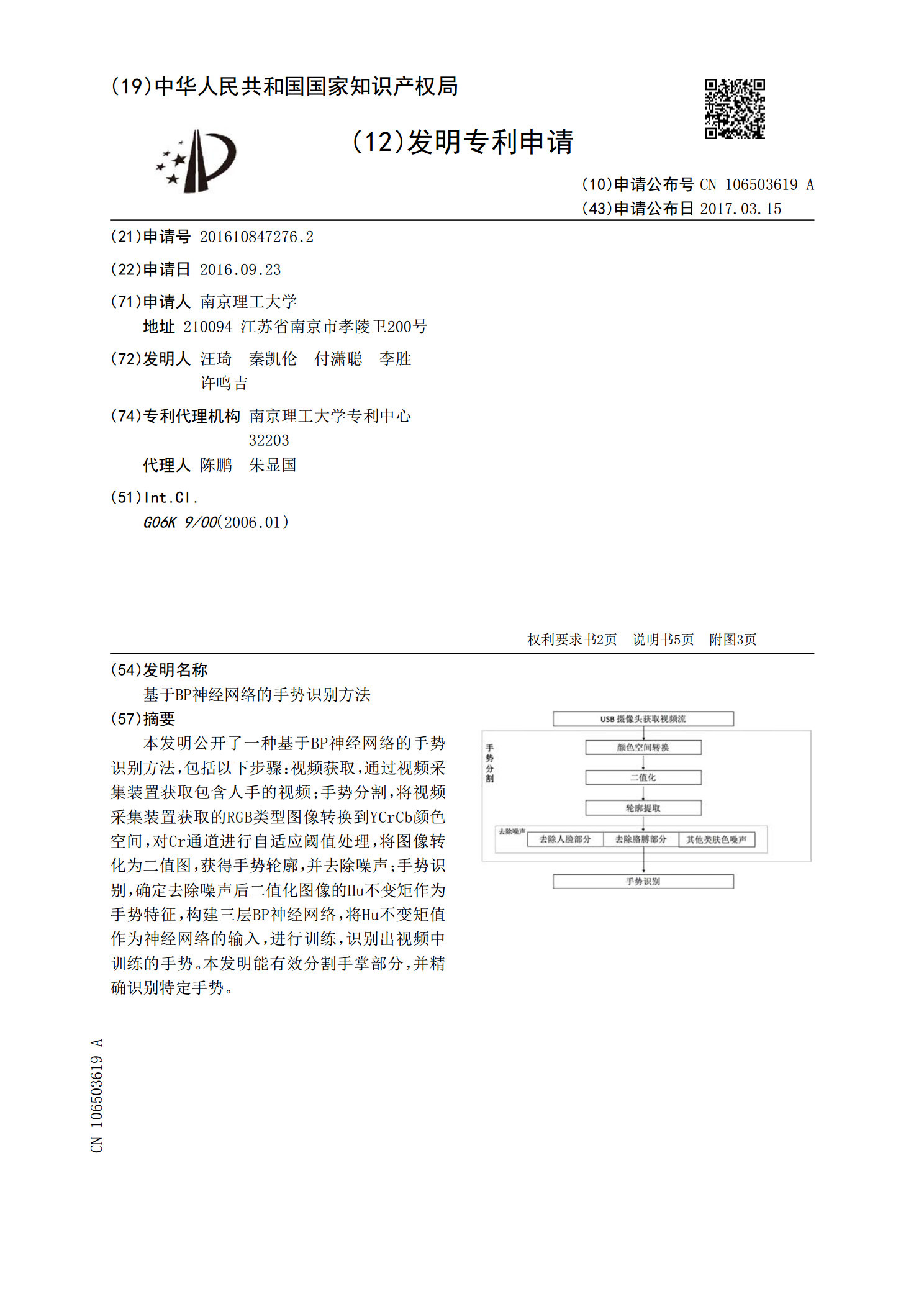
本发明公开了一种基于BP神经网络的手势识别方法,包括以下步骤:视频获取,通过视频采集装置获取包含人手的视频;手势分割,将视频采集装置获取的RGB类型图像转换到YCrCb颜色空间,对Cr通道进行自适应阈值处理,将图像转化为二值图,获得手势轮廓,并去除噪声;手势识别,确定去除噪声后二值化图像的Hu不变矩作为手势特征,构建三层BP神经网络,将Hu不变矩值作为神经网络的输入,进行训练,识别出视频中训练的手势。本发明能有效分割手掌部分,并精确识别特定手势。