
主动重心控制系统目标重心位置研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主动重心控制系统目标重心位置研究.docx
主动重心控制系统目标重心位置研究论文题目:主动重心控制系统目标重心位置研究摘要:在机器人工程、自动化控制和生物医学工程领域,主动重心控制系统(ActiveCenterofMassControlSystem,ACMCS)是一项重要的研究内容。目标重心位置是ACMCS的重要研究方向之一。本文首先介绍了ACMCS的相关概念和研究现状,然后详细分析了目标重心位置的意义并给出了一种基于传感器的实现方案。最后,通过实验验证了该方案的可行性和有效性。关键词:主动重心控制系统、目标重心位置、传感器、实验验证1.引言主动重
重心控制系统以及包括该重心控制系统的车辆.pdf
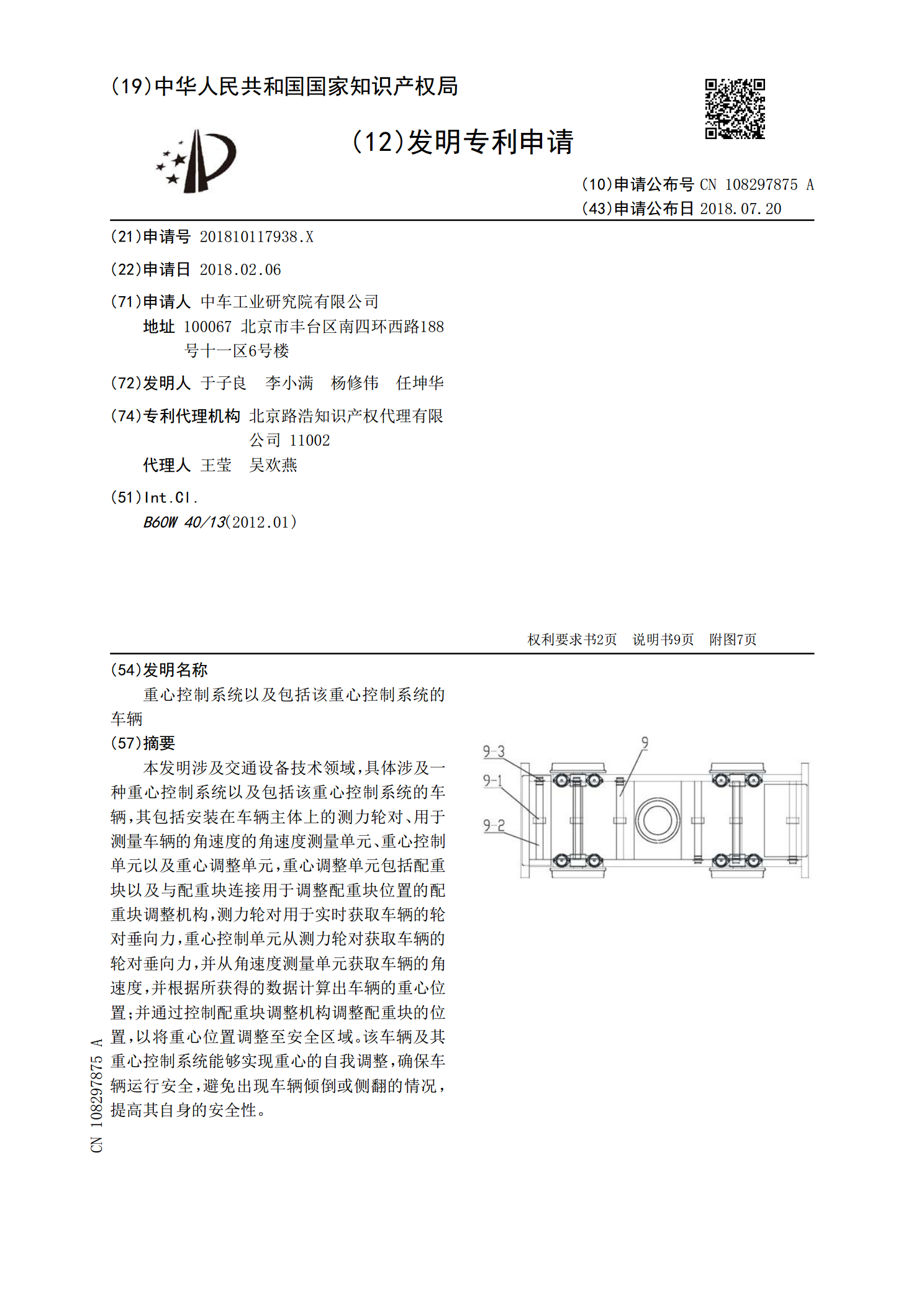
本发明涉及交通设备技术领域,具体涉及一种重心控制系统以及包括该重心控制系统的车辆,其包括安装在车辆主体上的测力轮对、用于测量车辆的角速度的角速度测量单元、重心控制单元以及重心调整单元,重心调整单元包括配重块以及与配重块连接用于调整配重块位置的配重块调整机构,测力轮对用于实时获取车辆的轮对垂向力,重心控制单元从测力轮对获取车辆的轮对垂向力,并从角速度测量单元获取车辆的角速度,并根据所获得的数据计算出车辆的重心位置;并通过控制配重块调整机构调整配重块的位置,以将重心位置调整至安全区域。该车辆及其重心控制系统能

考虑重心位置的飞机装载优化问题的研究.docx
考虑重心位置的飞机装载优化问题的研究标题:基于重心位置考虑的飞机装载优化问题研究摘要:飞机装载优化是一个重要的航空领域问题,对飞机的安全性、航程和乘客舒适度等方面都具有重要意义。本文研究了基于重心位置考虑的飞机装载优化问题,通过分析飞机重心位置对飞行性能的影响,提出了一种综合考虑约束条件的装载优化算法,并应用于具体飞机模型,得到了一组合理的装载方案。研究结果表明,优化算法能够有效提高飞机装载的安全性和经济性。关键词:飞机装载优化,重心位置,约束条件,模型1.引言飞机装载优化问题是指在满足各种约束条件下,使

跳高运动中的重心位置及能量问题研究.docx
跳高运动中的重心位置及能量问题研究跳高是田径运动中的一项技术活动,要求运动员以特定的姿势、动作和力量完成跳越横杆的任务。在跳高运动中,重心位置和能量问题是决定运动员跳高成功与否的重要因素。本文将从重心位置和能量问题两个方面进行研究,并分析它们对跳高运动的影响。一、重心位置在跳高运动中的作用重心是指物体平衡时的中心位置。在跳高运动中,运动员的重心位置对其跳高成绩起着关键作用。重心位置的高低、稳定与否直接影响到运动员起跳时的平衡和跳越横杆的稳定性。1.起跳时的重心位置起跳时,运动员的身体必须保持平衡,重心位置
重心位置与物体平衡的关系.pdf
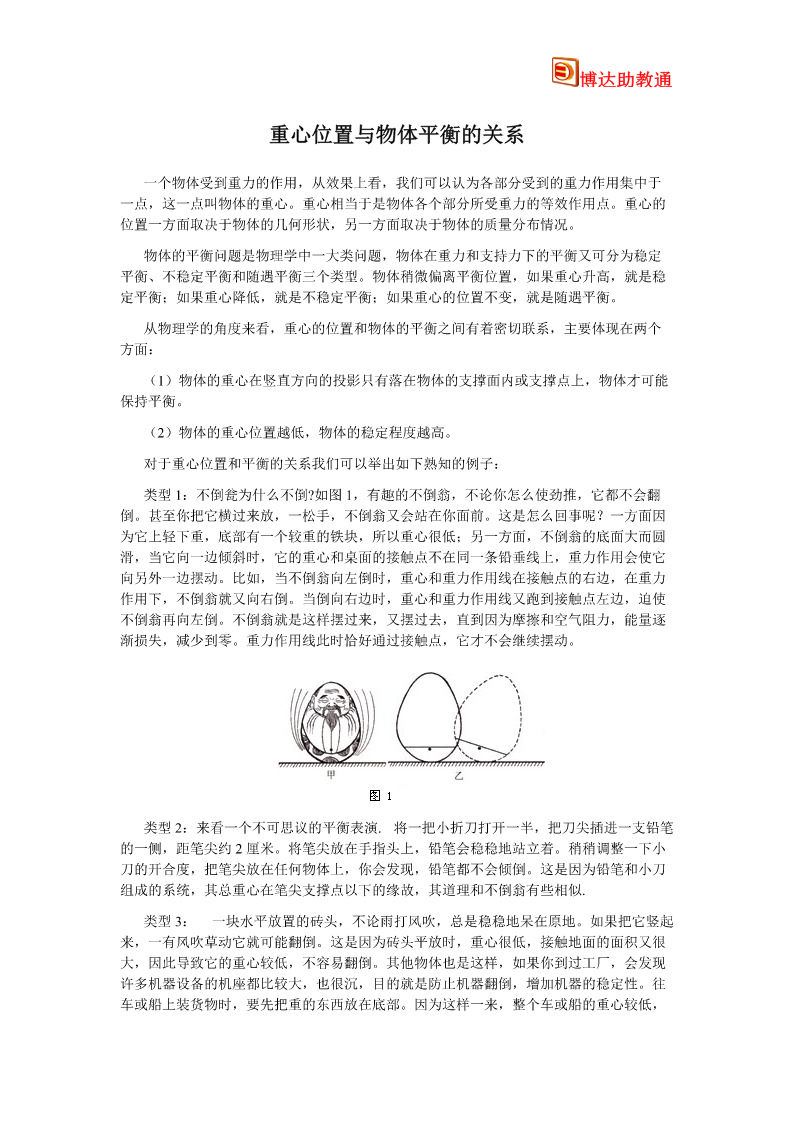
博达助教通重心位置与物体平衡的关系一个物体受到重力的作用,从效果上看,我们可以认为各部分受到的重力作用集中于一点,这一点叫物体的重心。重心相当于是物体各个部分所受重力的等效作用点。重心的位置一方面取决于物体的几何形状,另一方面取决于物体的质量分布情况。物体的平衡问题是物理学中一大类问题,物体在重力和支持力下的平衡又可分为稳定平衡、不稳定平衡和随遇平衡三个类型。物体稍微偏离平衡位置,如果重心升高,就是稳定平衡;如果重心降低,就是不稳定平衡;如果重心的位置不变,就是随遇平衡。从物理学的角度来看,重心的位置和物