
侧视LiDAR数据多层次单木点云分割研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

侧视LiDAR数据多层次单木点云分割研究.docx
侧视LiDAR数据多层次单木点云分割研究侧视LiDAR数据多层次单木点云分割研究摘要随着无人驾驶车辆和智能交通系统的发展,对于准确、高效分割道路环境和交通标志的需求愈发增加。本研究提出了一种利用侧视LiDAR数据进行多层次的单木点云分割方法,以实现道路环境和交通标志的准确分割。本文首先介绍了侧视LiDAR数据的原理和特点,并分析了现有的点云分割方法的优缺点。接着,我们提出了一种基于点云语义分割的多层次单木点云分割框架,该框架将点云分割任务分为两个层次:粗分割和细分割。粗分割阶段使用传统的分类算法来将不同物

侧视LiDAR数据多层次单木点云分割研究的任务书.docx
侧视LiDAR数据多层次单木点云分割研究的任务书任务书一、研究目的随着现代激光雷达(LiDAR)技术在野外环境下的日益普及,获取的LiDAR数据在动植物生态和森林资源监测、城市规划、地理信息系统(GIS)和气象学等诸多方面应用越来越广泛,而木材资源是我们生产和生活中不可或缺的基础材料之一。因此,对林木的监测和分析具有重要意义,特别是机器自动化的单木分割技术,可以显著提高测量效率和准确度。因此,本研究旨在开发一种多层次单木点云分割算法,以提高算法的性能和准确度。二、研究内容1.研究林木点云的特征:本任务要求
一种基于无人机Lidar点云数据的果树单木分割方法.pdf
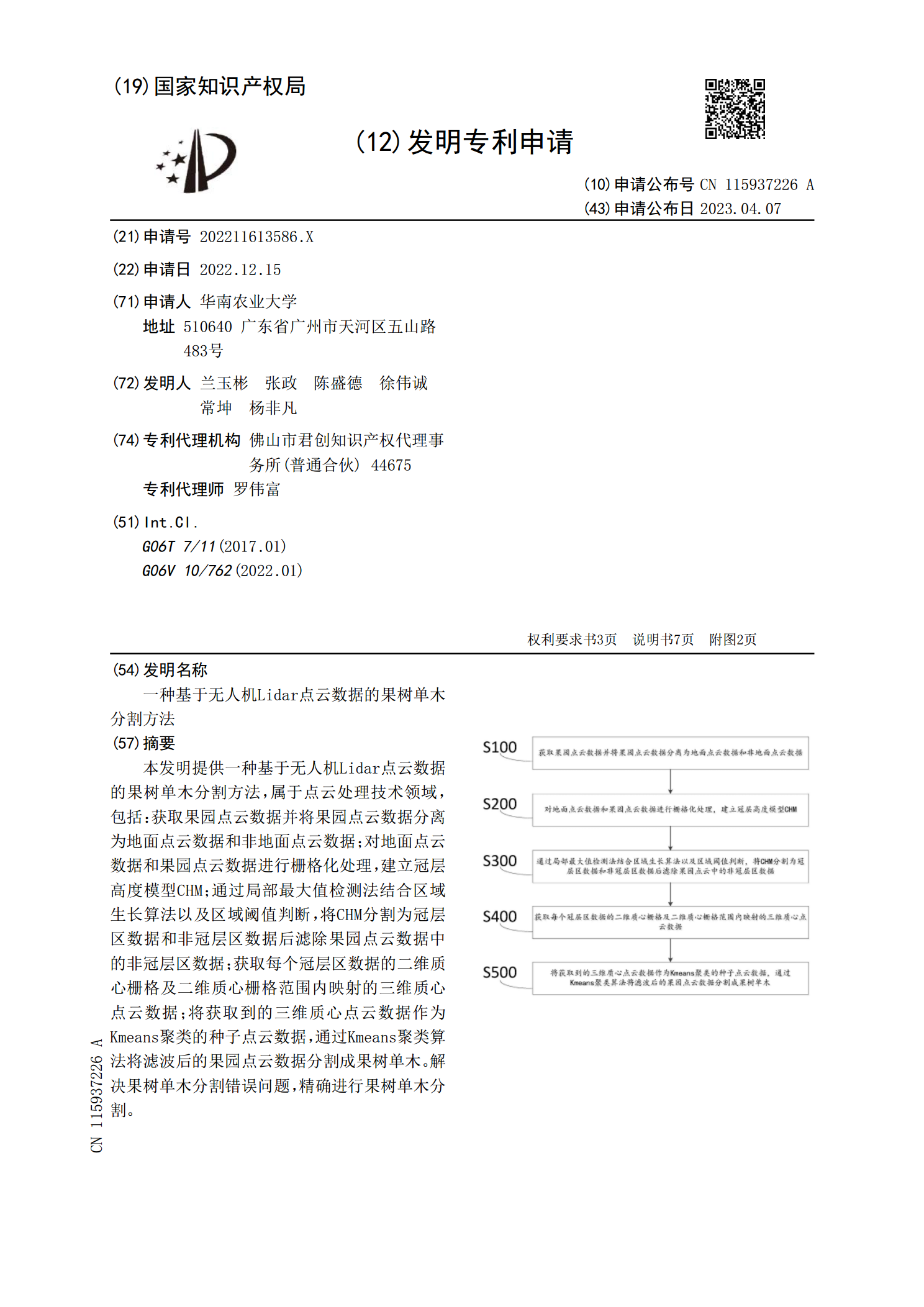
本发明提供一种基于无人机Lidar点云数据的果树单木分割方法,属于点云处理技术领域,包括:获取果园点云数据并将果园点云数据分离为地面点云数据和非地面点云数据;对地面点云数据和果园点云数据进行栅格化处理,建立冠层高度模型CHM;通过局部最大值检测法结合区域生长算法以及区域阈值判断,将CHM分割为冠层区数据和非冠层区数据后滤除果园点云数据中的非冠层区数据;获取每个冠层区数据的二维质心栅格及二维质心栅格范围内映射的三维质心点云数据;将获取到的三维质心点云数据作为Kmeans聚类的种子点云数据,通过Kmeans聚

LiDAR点云数据分割方法的比较分析.docx
LiDAR点云数据分割方法的比较分析一、引言LiDAR(LightDetectionandRanging)技术是通过激光扫描获取物体表面精细的三维点云数据,具有高精度、高密度、高分辨率等优点,被广泛应用于地形测绘、建筑物三维建模、城市规划、自动驾驶等领域。然而,对于大规模点云数据的处理和分析,尤其是需要对点云数据进行语义分割时,由于其数据量大、存在高度的噪声等特点,如何实现高效、准确并且可扩展的点云语义分割仍然是一个挑战。本文将对常见的LiDAR点云数据分割方法进行比较分析。二、LiDAR点云数据分割方法

LiDAR点云数据分割的自适应回波比率算法研究.docx
LiDAR点云数据分割的自适应回波比率算法研究标题:LiDAR点云数据分割的自适应回波比率算法研究摘要:激光雷达(LiDAR)技术在地理信息、自动驾驶和机器人等领域被广泛应用。点云数据分割是LiDAR数据处理的重要任务之一。本论文针对现有的点云数据分割算法在处理复杂环境时面临的挑战,提出了一种基于自适应回波比率的分割算法。首先,分析了LiDAR点云数据的特点和应用场景,并探讨了现有算法的局限性。然后,提出了自适应回波比率算法的关键思想和流程,并详细介绍了算法的实现过程。最后,通过实验验证了算法的有效性和准