
两自由度冗余驱动并联机器人的误差分析与优化.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

两自由度冗余驱动并联机器人的误差分析与优化.docx
两自由度冗余驱动并联机器人的误差分析与优化题目:两自由度冗余驱动并联机器人的误差分析与优化摘要:本文针对两自由度冗余驱动并联机器人的误差分析与优化问题进行了研究。首先,对两自由度冗余驱动并联机器人的结构特点进行了介绍,并建立了其运动学模型和动力学模型。在此基础上,分析了机器人在运动过程中可能出现的误差类型,并提出了相应的误差补偿方法和优化策略。最后,通过数值仿真和实验验证,证明了所提出的误差补偿方法和优化策略能够有效地提高机器人的运动精度和稳定性。关键词:两自由度冗余驱动并联机器人、误差分析、误差补偿、优

两自由度冗余驱动并联机器人的误差分析与优化的综述报告.docx
两自由度冗余驱动并联机器人的误差分析与优化的综述报告随着工业自动化的不断发展,机器人应用越来越广泛。其中,并联机器人是一种高精度、高刚性、高运动速度、高负载能力的机器人,能够满足工业生产过程中对高精度运动的需求。而两自由度冗余驱动并联机器人更是在精度和载荷能力方面更为出色。然而,由于机器人本身缺陷、控制算法以及环境因素等原因,机器人在实际应用中难免会出现误差,阻碍了其在工业生产中的广泛应用,因此,误差分析及其优化是并联机器人研究的重点之一。误差来源主要分为两个方面,一是机器人本身结构存在误差,二是控制算法

球面两自由度冗余驱动并联机器人弹性动力学分析.docx
球面两自由度冗余驱动并联机器人弹性动力学分析球面两自由度冗余驱动并联机器人弹性动力学分析摘要:随着机器人技术的发展与应用的广泛推广,对机器人系统的动力学性能要求也日益提高。其中,弹性动力学是机器人研究中的重要热点之一。本文将对球面两自由度冗余驱动并联机器人的弹性动力学进行分析和研究,旨在为相应领域的研究提供参考和借鉴。1.引言球面两自由度冗余驱动并联机器人,也称为2-RER机器人,是一种特殊的并联机器人结构。相比于传统的机器人系统,2-RER机器人在一定程度上具有冗余驱动自由度。这种结构对机器人的动力学性

冗余自由度机器人误差分析与补偿算法的研究.docx
冗余自由度机器人误差分析与补偿算法的研究冗余自由度机器人误差分析与补偿算法的研究摘要:随着机器人技术的发展,冗余自由度机器人在工业生产以及服务机器人等领域得到了广泛的应用。然而,由于机械结构等因素的影响,冗余自由度机器人在运动过程中常常存在一定程度的误差,导致精度和重复性方面的问题。因此,本文针对冗余自由度机器人的误差分析与补偿算法进行了研究,并提出了一种有效的解决方案。关键词:冗余自由度机器人;误差分析;补偿算法1.引言冗余自由度机器人是指在实现特定任务所需的自由度之外,还具有额外自由度的机器人系统。这
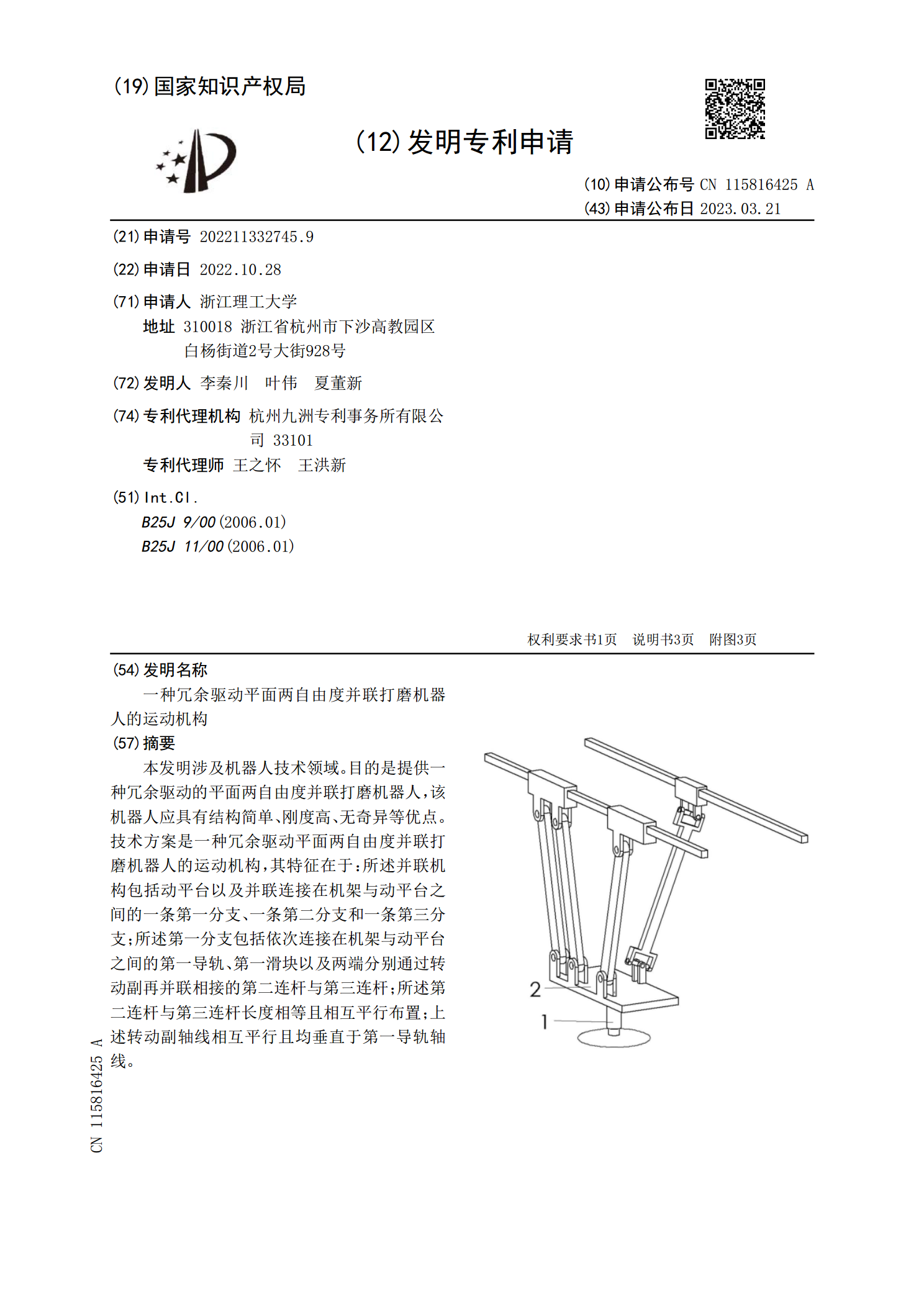
一种冗余驱动平面两自由度并联打磨机器人的运动机构.pdf
本发明涉及机器人技术领域。目的是提供一种冗余驱动的平面两自由度并联打磨机器人,该机器人应具有结构简单、刚度高、无奇异等优点。技术方案是一种冗余驱动平面两自由度并联打磨机器人的运动机构,其特征在于:所述并联机构包括动平台以及并联连接在机架与动平台之间的一条第一分支、一条第二分支和一条第三分支;所述第一分支包括依次连接在机架与动平台之间的第一导轨、第一滑块以及两端分别通过转动副再并联相接的第二连杆与第三连杆;所述第二连杆与第三连杆长度相等且相互平行布置;上述转动副轴线相互平行且均垂直于第一导轨轴线。